「百公里加速 3 秒」、「无人驾驶」,听起来还真有点小激动。但更重要的是,这是一群学生造出来的一辆车。
这是全国第一辆无人驾驶赛车,由北京理工大学无人赛车队打造。他们之所以做这个,是为了参加今年 8 月份的「德国大学生方程式」无人车组的比赛。
提前要明确一点,这辆车只是「原理验证车」,可以算是前期试水,很多设计并不完善。在今年 3 月,他们会开始造一辆尺寸更大的无人车,偏向于军工使用。
如何做到无人驾驶?
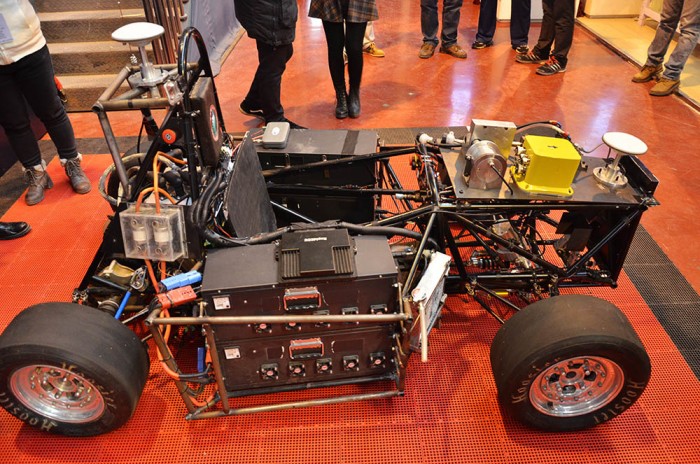
首先来说说这辆车的机械配置,车队的人说百公里加速做到了 3 秒。这辆车的车身由「银鲨二代」改装而来,银鲨二代是北理工在 2013 年设计出的电动赛车。
动力方面是轮边驱动双电机设计,使用了斯洛文尼亚的 Emrax207 电机,峰值功率 80 千瓦,重 8 公斤;电池采用了磷酸铁锂的单体电池,安装位置就在驾驶位两侧;电机控制器来自于德国 Unitic 公司,安装位置在防滚架下方。
之后就是传动结构了,他们拆除了赛车原有的油门和刹车踏板、方向盘等机构,取而代之的分别是制动舵机和对应用的减速器,以及转向舵机。
机械条件能够胜任无人驾驶后,接下来要进行的就是一系列电子化改造。
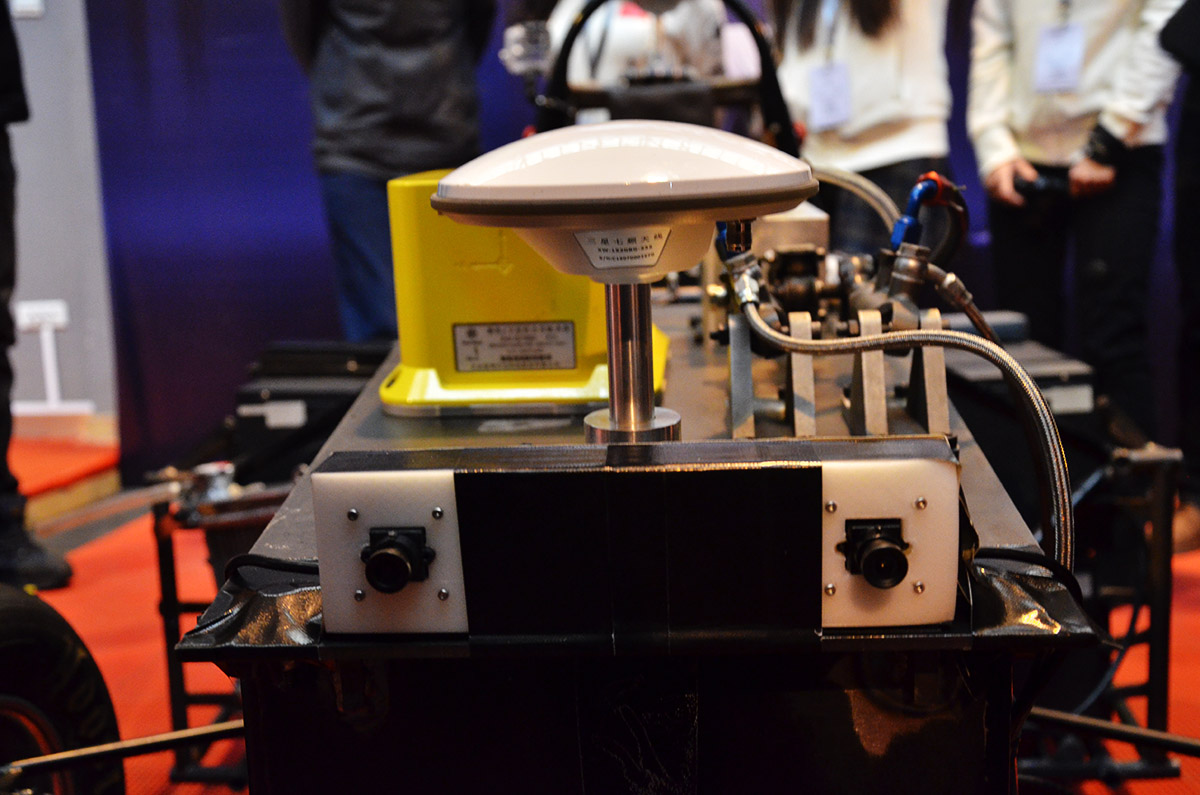
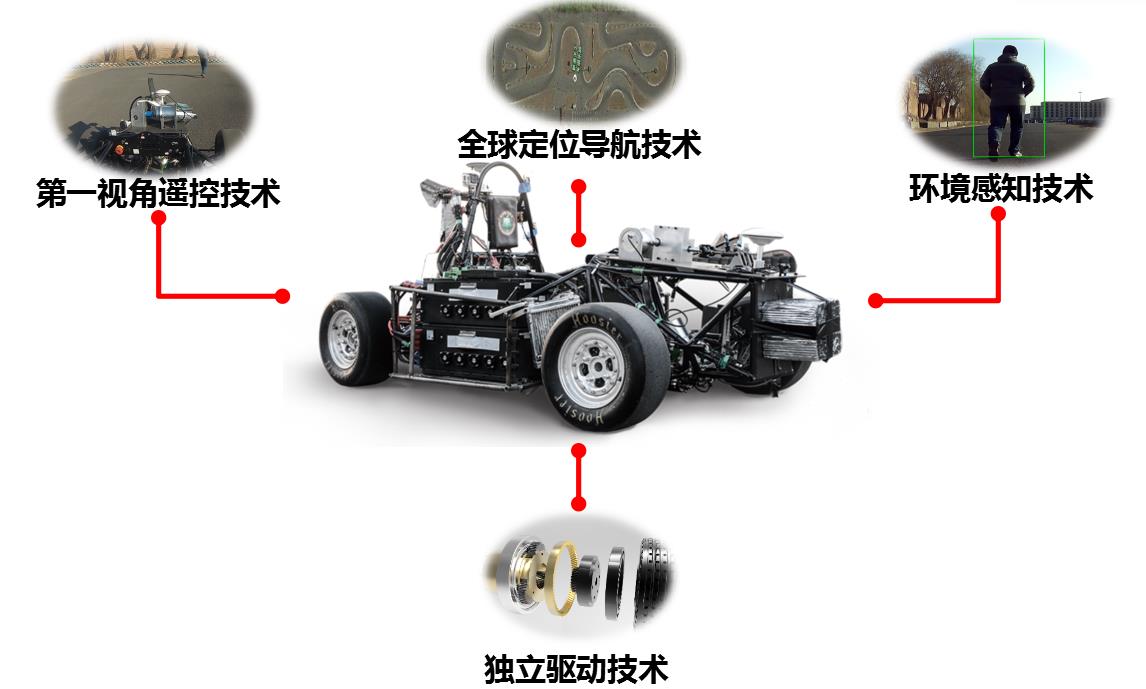
环境感知方面,使用了双目摄像头用于行人侦测、避障这样的局部路线规划。另外,他们还打算用 Velodyne 的 16 线激光雷达,处于调试阶段,尚未上车。
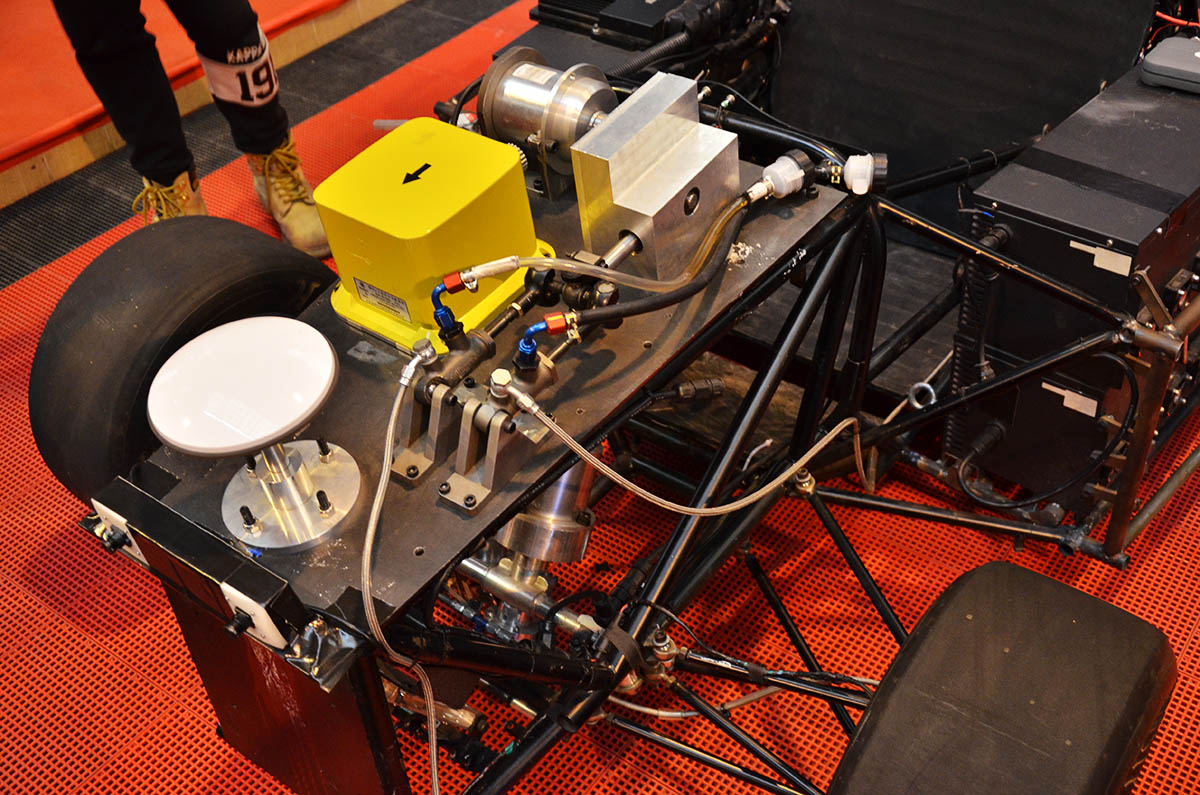
全局路线规划依靠 GPS 系统,在车前方和后方安装了各安装了 GPS 天线。由于赛道并不大,定位稍有差池就冲出赛道了,所以特别介绍一下他们的定位方案,主要就是「GPS 差分原理」。
他们在赛道周围布置了 GPS 基准站(精确位置已知),之后会得出基准站到卫星的「改正数」,基准站会把这个数据实时发送给车辆。车辆会同时接受卫星信号和基站信号,经过处理后就会得到非常高精度的定位。目前,北理工这辆车的定位精度是「1 厘米」,可以满足赛道使用了。
有了环境感知设备后,就需要有个「大脑」来思考和控制车辆了。
在右侧电池箱上的是车辆底层控制器,用来控制车辆速度、转向动作;另外还有一个顶层控制器,接入了 GPS 和摄像头等数据,需要计算量很大的工作站才能完成,相当于一个「决策层」。在左侧电池箱上的是无线数据通讯的电台,用来和控制人员进行通讯。
经过了一系列改造后,车重大大上升,达到了 300 公斤左右,而一般参加大学生方程式的电动车在 200 公斤左右,好在这辆无人驾驶车不需要赛车手…
如何无人驾驶?
目前来看,北理工的这辆车可以实现三种方式的无人驾驶。
第一种方式是通过把赛道的 GPS 坐标输入到赛车里,车就会按照路线行驶,主要依靠高精度定位。用他们的话说,这叫「给定路径下的极限驾驶」。
第二种方式是遥控驾驶,通过一个改装的航模遥控来控制车辆,负责遥控的人可以观看第一视角实时视频,由无限数据通讯模块负责。

第三种方式是跟随行人,在展示的视频里,这辆车可以跟在人后面走。当人突然停下时,车也可以自动刹停,主要依靠的是车前方双目摄像头以及行人识别技术。

作为一辆「原理验证车」,北理工的这辆无人驾驶赛车,硬件配置上该有的已经都有了。在设计方面,还是需要改进,比如 GPS 系统和控制器直接布置在了车身外。或许可以通过合理的布局,把外露的硬件集成在车身内部,从而降低赛车重心,提高赛车空气动力性能。毕竟,这还是一辆赛车。
至于我们前面提到的「德国大学生方程式」无人车组比赛,其实是第一届,甚至目前只有北理工一只参赛队伍,所以北理工之于这项赛事,也就扮演了「规则制定者」的角色。
另外,北理工本身在无人驾驶研发方面也积累了非常多的经验,在国内相关研究领域很知名。他们曾和比亚迪合作研发了线控无人驾驶实验汽车,并且参加全国无人车比赛。
而眼前这辆无人驾驶电动赛车,对于这群学生来说,更大的意义在于他们在造车过程中学习到了什么,比如,在和队员们的交流过程中,他们说最大的瓶颈就是「经费问题」了。
创新不易,大学里的创新更加不易。

原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)&极市 (微信号:geeket)。



希望我们可以为被北理工赢得一份骄傲,为中国无人车的发展做出一份贡献!相信,科技引领时代