
本文作者:亮道智能,这家公司主要提供自动驾驶智能化测评服务,致力于推动高级自动驾驶(L3&L4)量产落地,技术路径基于激光雷达,主要关注方向是自动驾驶汽车量产开发 V 流程中的环境感知系统测试验证。
作为德系汽车三强,奥迪、宝马、奔驰在自动驾驶研发方面一直保持着稳健的作风,产品化进程也丝毫没有放松。在 2018 年量产了全球首款高速拥堵路况 L3 自动驾驶后,奥迪透露要在 2021 年将支持城市环境复杂道路状况的自动驾驶产品推向市场;宝马集团计划 2021 年量产具备 L3 自动驾驶功能的车型;奔驰想在 2021 年后完成城市 L4 自动驾驶车辆的大规模部署。
SOP 前的量产研发工作正在紧锣密鼓地展开。和概念验证阶段的工作不同,实现 90%的安全相对容易,但是无限接近 100%安全的过程,就变得极具挑战。在自动驾驶汽车量产上路之前,测试验证是确保安全的前提。德系三强在自动驾驶测试验证上的态度和实践,或许可以给我们带来一些启发。
测试验证不是收尾工程,而是量产研发的重要组成部分
自动驾驶是一个全新的领域,行业内还没有形成成熟的正向研发流程。目前业内普遍做法是基于经典的软件开发 V 模型(如下图)进行自动驾驶产品的量产研发。V 模型左侧是产品设计开发,右侧为测试验证,左右两侧共同组成了产品量产研发的完整过程。
透过 V 模型我们可以看到,测试验证不是产品定型后的收尾工作,而是关联到每个阶段质量把控的重要环节,开发和测试同时进行,可以缩短开发周期,快速开发出满足需求的产品。理想状态下,在产品设计和功能安全定义时,就该对要做哪些测试验证心中有数。
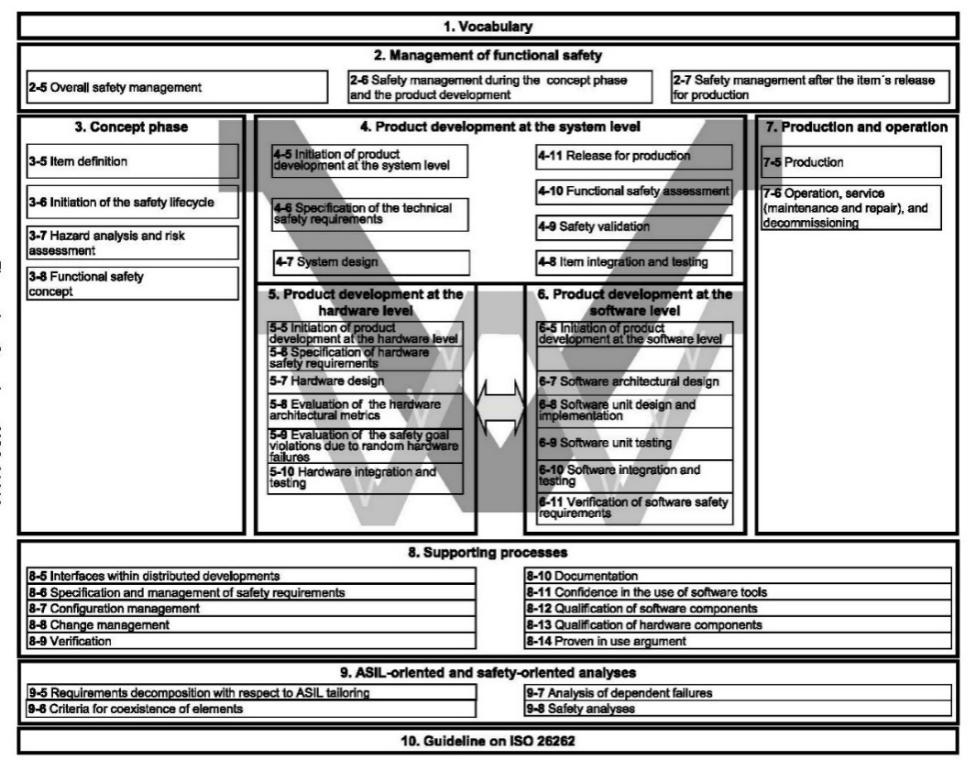
△ISO26262 功能安全 V 模型(来源:ISO 26262)
值得注意的是,自动驾驶是一个复杂的大系统,测试验证工作也随之变得复杂起来。并且,自动驾驶测试验证不仅要评测产品功能,也要保证整个产品开发过程符合功能安全。目前 ISO26262 也已经将功能安全的相关工作部署到了 V 模型中,来确保自动驾驶产品足够安全可靠。
奔驰在一份公开材料中,用一页内容专门介绍了自动驾驶测试验证的复杂流程,以及如何保证批量生产的一致性和可靠性。
为了让自动驾驶汽车保持相同的安全质量,每个模块、功能、子系统、系统集合,都要进行充分的验证测试。梅赛德斯-奔驰在单个模块(比如激光雷达传感器、计算单元,以及执行器)开发时就启动了测试验证工作。经过试验台、硬件在环(HIL)、模拟仿真等方法来验证单个模块、子系统的性能和鲁棒性。
顺利通过上述步骤,梅赛德斯-奔驰才会把不同模块和不同模块构成的子系统部署到可以自动控制的车上做进一步的测试。这些车不会直接进入真实的交通环境,它们会经历实验室、测试道、模拟仿真环境验证之后,才会进入路测环节。
自动驾驶产品的软件和硬件的测试验证会分开进行,并且各自会经历不同级别的测试验证,最后整合到一起。以软件为例,原始代码本身一定要满足严格的质量需要,多数源代码会被标准化写入汽车控制器。不同方面的软件行为和功能可以在虚拟仿真环境中或者在硬件在环测试台测试。通过对软件的持续测试,研发人员让软件行为更加安全,并且富有弹性。
测试验证要平衡准确性、经济性和安全性
据彭博社 2018 年 5 月的一篇文章统计,大众集团在自动驾驶和电动车研发的投入为 84 亿美元,戴姆勒集团每年在自动驾驶的预算为 9 亿美元,宝马集团在自动驾驶方向的年支出为 6.3 亿美元。虽然三大集团没有公布自动驾驶测试验证的预算,但可以预测,随着 SOP 时间节点的临近,越来越多的投入将会用于测试验证。
只需做一个粗略的统计,你就会发现德系三强重金投入的原因。自动驾驶测试验证成本将是一笔庞大的支出,包括但不限于以下费用:实验室建设费用、基础设施成本、员工成本、车辆成本、工程支出、能源成本、测试场地租赁成本、路测牌照申请成本、保险支出、数据挖掘成本,以及最贵的时间成本。
因此,很多人将自动驾驶比作一场马拉松,要在这场马拉松中最后抵达终点,不仅要以安全为目标,让不同的测试验证方法更好地服务产品研发,而且要精打细算花好每一分钱。
仿真测试可以节约时间,而且相比不成熟的产品直接开启自动驾驶模式上路测试,要更加安全。
模拟器可以非常方便地「制造」测试验证场景,因此你不用到物理世界中「追逐」不同的天气(比如雨雪、光照等变化)。模拟仿真环境可以大大节约时间成本,宝马在一份资料中介绍,利用模拟仿真,每天测试验证的场景数量可以达到两百万个。

△梅赛德斯奔驰利用仿真软件进行测试验证,可以设置不同光照和交通参与者的情况(来源:奔驰公开资料)
对环境感知系统测试验证时,为了确保仿真测试结果的真实性和有效性,需要对传感器、交通环境、不同交通环境中传感器的表现分别建模。奥迪全资自动驾驶公司 Autonomous Intelligent Driving 的自动驾驶模拟仿真测试合作方是以色列公司 Cognata,后者的产品特色之一,就是重建了世界各地的城市交通模型。
随着建立的仿真模型越来越逼近真实的物理模型,建模的技术难度和投入成本都在不断增加。并且,建模要求工程师对传感器本身有非常深刻的理解,但是激光雷达等自动驾驶必备传感器还在研发过程中,因此对传感器建模来说又增加了不小的难度。
并且,仿真环境与真实环境相比,永远存在 Gap。不少业内人士认为,传感器表现对真实环境的依赖很强,如果以量产为目标,最理想的测试验证环境是真实的物理环境。
奥迪工程师在向媒体开放展示 A8 自动驾驶功能时,特地强调在真实环境测试验证感知系统的重要性,只有在真实路测时,你才能确定在大雨天、在光影变化的隧道里、在路面水塘反光或者是阳光直射的下午 3 点,环境感知系统一样有效、可靠。同时,自动驾驶产品要针对不同的交通环境,开展本土化研发。奥迪官方曾表示,在奥迪 A8 自动驾驶功能完美进入不同市场之前,要进行至少 6 个月的真实路测,来验证软件系统在不同交通环境中足够安全可靠。
自动驾驶测试验证需要的新能力——大数据挖掘
自动驾驶测试验证中,传感器采集大量的环境数据,测试验证涉及的数据量飙升。这些数据会被存储起来,更好地服务自动驾驶软件算法的开发工作。因此,主机厂必须具备分析、管理、运营数据的能力,并且要避免数据垃圾,努力缩短数据分析的时间。
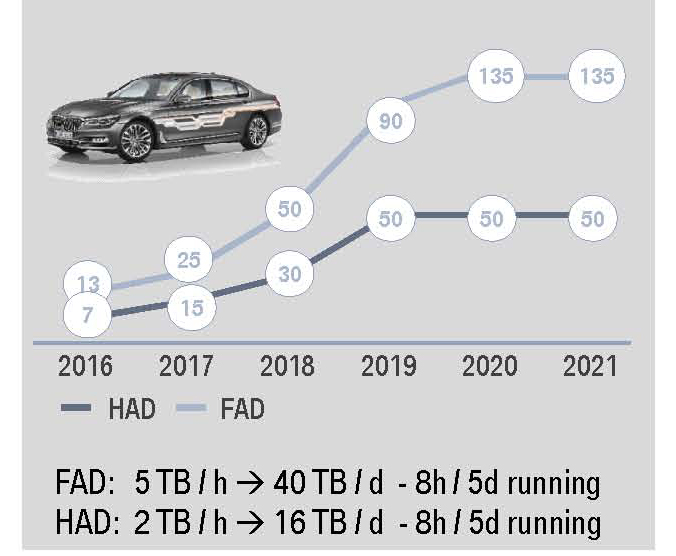
△宝马自动驾驶数据采集和路测车队规划(来源:宝马公开资料)
在大数据测试验证方面强调最多的是宝马。
大量有效数据从哪里来?答案是自建数据采集车队。宝马与英特尔和 Mobileye 联盟从 2017 年下半年开始,陆续推出了 40 辆自动驾驶数据采集和路测车。根据宝马的计划,2019 年计划部署的汽车数量将达到 90 辆高度自动驾驶汽车、50 辆全自动驾驶汽车,在全球展开自动驾驶测试验证和数据采集工作。(另有宝马 2017 年 10 月的新闻显示,高度自动驾驶和全自动驾驶的数据采集测试车总数为 100 辆,此处采用 2017 年 12 月资料中的数据。)
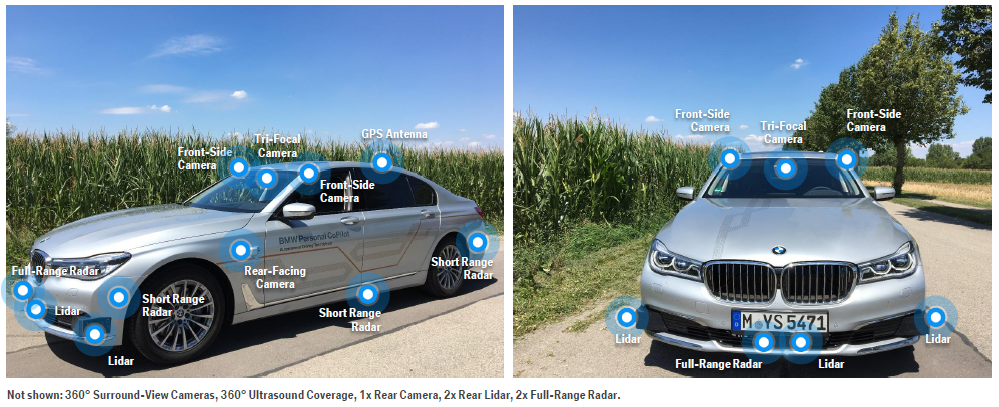
△为了更好的检测城市交通环境中可能出现的目标物,宝马升级后的传感器套装将包括 44 个传感器,每天产生海量数据(来源:宝马公开资料)
这些测试车在世界各地采集环境数据。根据宝马的一份官方资料,每辆宝马高度自动驾驶汽车产生的数据量将达到 2TB/h,全自动驾驶汽车每小时产生的数据量更多,将达到 40TB/h。

△(上)宝马工程师将测试车上存储数据的硬盘取下后拷贝到服务器中(来源:AutomotoTV)
(下)宝马大数据中心外景(来源:宝马公开资料)
这些车每天完成测试验证环节后,工程师会将存储数据的硬盘会从测试车上取下,将数据拷贝至研发中心的服务器中。随后,这些存储了数据的服务器随后会被转运到大数据中心。在经过数据质量控制、处理等步骤之后,宝马的大数据工程师完成 PB 级的数据搜索,通过大数据分析后,为算法开发工程师迭代更新算法提供参考。
宝马在介绍大数据测试验证的工作时,常常提到的一个词——「大数据驱动」。自动驾驶测试验证涉及的数据量将达到 PB 级别。为此,宝马在慕尼黑专门自建了全新的大数据中心用于自动驾驶的研发。据介绍,2017 年宝马的数据中心规模具备了存储 70PB 数据能力,目标在 2019 年达到 200PB 的能力,并且在之后持续增长。
随着测试验证需求不断涌现,未来 OEM 需要更多懂得大数据的服务商来帮助主机厂建立云平台和数据中心。并且,自动驾驶产品的一大特点是在落地后持续学习进步,对大数据的使用与分析将贯穿量产产品的生命周期。
小结
从德系三强的分享中,我们看到了前瞻创新和产业研发之间的不同。当我们以「研发安全、可靠的自动驾驶产品」为目标时,就需要用系统工程的思维来看待量产研发和测试验证。量产研发涉及的大数据采集、处理、分析流程,不仅事关技术,也依赖量产项目的经验积累,以及持久的人力资金投入。
自动驾驶量产不是一件容易的事,为安全兑现量产承诺的每一分努力,都不奢侈。↩