
北京时间今天凌晨,特斯拉的 7.0 版本固件终于正式发布了。之前搭载在 Model S 车型里的那些传感器,也终于有了用武之地。
通过这次固件更新,特斯拉实现了半自动驾驶功能,也就是他们所说的 AutoPilot。
自动驾驶:
这次的 7.0 更新,其实是「酝酿已久」的,不管是从不停的媒体报道上,还是从硬件准备上,都是如此。之前 7.0 固件消息的频繁曝光就不用说了,所谓的「硬件准备」,就是开头所说,在去年九月以后出厂的 Model S 车型里,就已经装备上了和自动驾驶有关的各种传感器、雷达,并且具备了初步自动驾驶的功能,比如变道辅助等等。
而这次 7.0 固件的更新,就是在之前的硬件基础上,完善软件层面的东西,丰富自动驾驶功能。新加入的功能包括:自动变道、自动平行车位泊车、紧急转向等。
当然,即使有这些功能的加入,它也不能算是完全的自动驾驶。它不能自动识别红绿灯这类东西,仍然需要司机来进行操作。它更大的用处是高速公路巡航。
其实这相当于把普通车型上的 ACC 自适应巡航再加入一些功能。如果看现在市面上搭载 ACC 功能的车型,最「低档」的是需要司机控制方向,车辆自动高速跟车,「中档」的是像奔驰 S 级那样,可以实现车道保持,而特斯拉这种,算是「高级」的,可以自动变道。只不过,市面上的这种「高级」车型,在此之前还真没听说过。

这个所谓的「自动变道」,在特斯拉上是这么回事:当你想并道的时候,打转向灯,车子会自动判断并道时机,并且自动完成并道操作。
必须得说明的是,因为这并不是完全自动驾驶,所以在行驶过程中,司机的手还是得放在方向盘上。
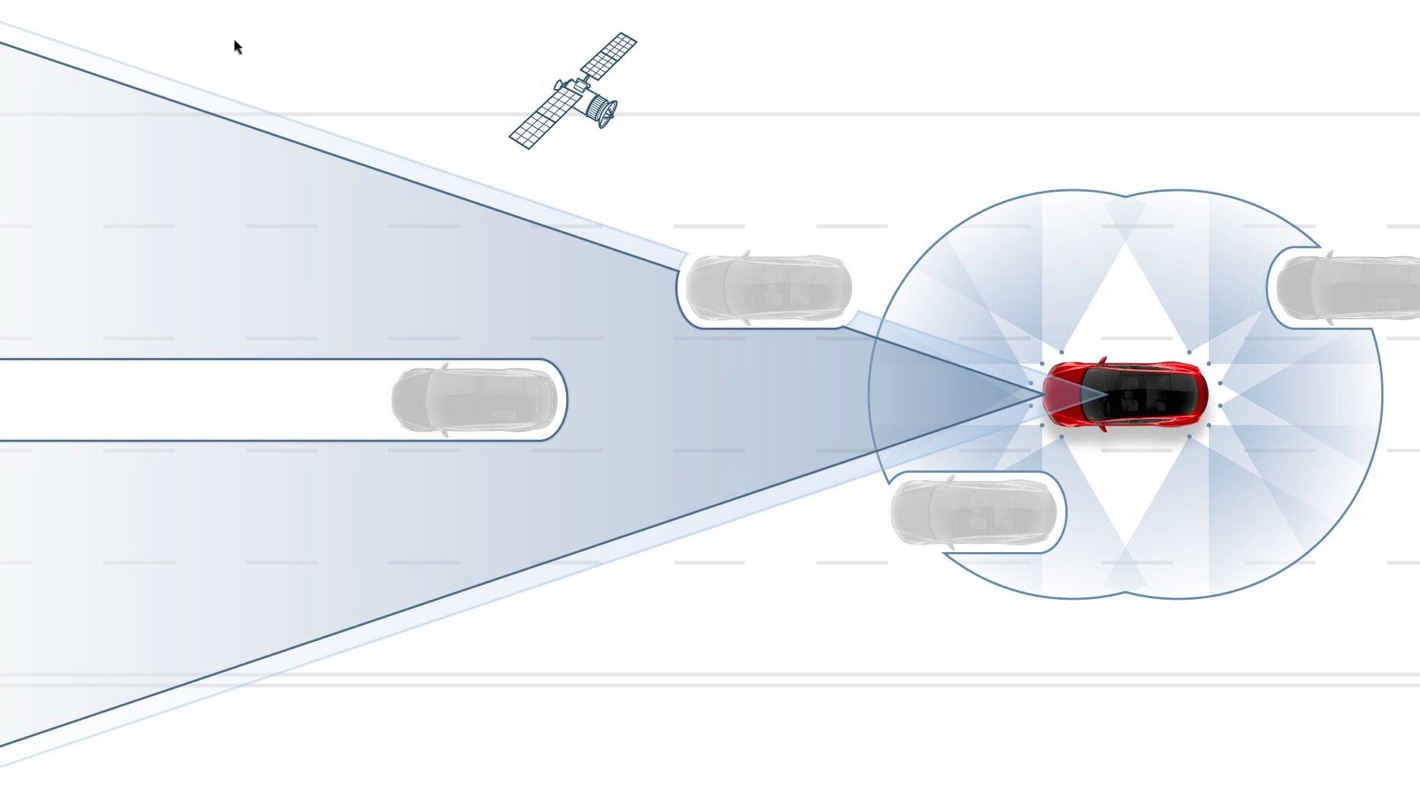
为了实现这些功能,特斯拉使用的硬件包括:围绕车身的 12 个超声波传感器(雷达)、前视摄像头、前雷达,当然,还得借助 GPS 定位系统。
在 Elon Musk 看来,凭借现在这套硬件,并不足以实现完全自动驾驶。但是,他也不认为完全自动驾驶需要借助 LIDaR(激光雷达,也就是谷歌无人车用的那种)。他说:I’m not a big fan of LIDaR。
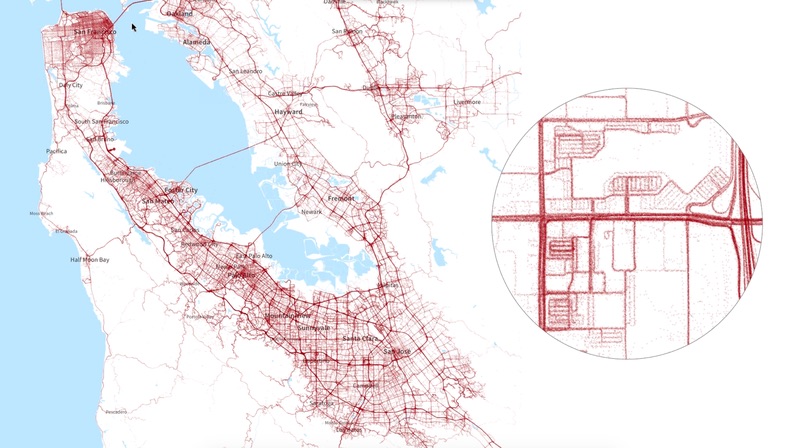
发布会的现场展示了一张特斯拉自动驾驶车队的轨迹图。从图上可以看出,在湾区,由他们的足迹绘制而成的地图,甚至包括了单独的停车位。
除了功能上的丰富,7.0 版本固件最大的变化其实很直观,就是 UI,包括液晶仪表盘和 17 寸屏幕。仪表盘为 AutoPilot 的加入进行了重新设计,17 寸屏幕的 UI 界面现在并没有相关图片,等接下来几天美国的用户陆续更新之后,就会知道它长什么样了。
Elon Musk 怎么说?
发布会的后半段是 Elon Musk 答记者问时间。美国记者们问了什么问题,其实我们也能大概猜到。无非是那几个:其他车厂也在做无人驾驶,你们有什么区别?什么时候才可以实现完全的自动驾驶?你不是害怕人工智能嘛,为什么还要做无人驾驶?诸如此类。
在整个的回答过程中,Elon Musk 说话经常会有停顿。对于人工智能(AI)的问题,他说:「如果我害怕 AI,为什么我还会做这个呢?我不认为我们应该害怕车子可以自动驾驶这件事,它们不会接管世界。」
他说,特斯拉准备在三年之内实现完全的自动驾驶,「怎么也得赶在那些传统车厂之前啊,他们不是号称 2020 年实现么?」他认为,这些车厂应该把车子当成互联设备来对待,这样就可以通过云端进行各种更新和功能改进。
这说到了一个本质问题上——这是一次通过在线更新实现的半自动驾驶。
(PS:7.0 固件先期只推送给美国车主,几周之后,才会轮到欧洲和亚洲车主)

原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
同时欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)& 极市 (微信号:geeket)。



One response to “特斯拉 7.0 版固件发布:终于实现「更高级」的半自动驾驶”