
如果可以投票选出 2016 年 CES 的关键词,我一定双手赞成选「自动驾驶」,几乎所有参展的汽车厂商或供应商都逃不开这件事儿。一些在展示自己尖端的传感器技术,一些在展示自己的高精度地图,还有的干脆直接发布了自动驾驶概念车。
而这几天令我最为深刻的事情之一,则是在 6 号在拉斯维加斯会议中心南馆会议室参加的一个小型发布会,与其说是发布会,还不如说是 Mobileye 的联合创始人兼 CTO Amnon Shashua 主讲的一堂「自动驾驶晋级课」,这位耶路撒冷希伯来大学教授、自动驾驶技术的大神用一个半小时的技术讲解,描述了 Mobileye 的自动驾驶技术路线,以及他们的商业逻辑和策略。
如果你还不知道 Mobileye,请参阅 GeekCar 此前的相关报道:
1.《Mobileye,一个造了 10 年的「摄像头」?》
2.《我们搞到了一台 Mobileye,并且花四个小时把它装进了车里》
3.《你是我的眼——高级驾驶辅助系统 Mobileye 评测》
4.《「CES 2016」为了自动驾驶地图,通用打起了用户车里摄像头的主意》
简单来说,在用户层面,Mobileye 是一套基于摄像头、可以给你提供驾驶员安全驾驶辅助功能的系统;在行业层面,Mobileye 给汽车厂商提供 ADAS 服务,全球已有超过 1 千万辆车使用它的技术,合作厂家包括奥迪、特斯拉、沃尔沃、通用、HKMC、日产、克莱斯勒等 OEM 厂商。
「游戏的开端是摄像头,但玩法却是自动驾驶。」
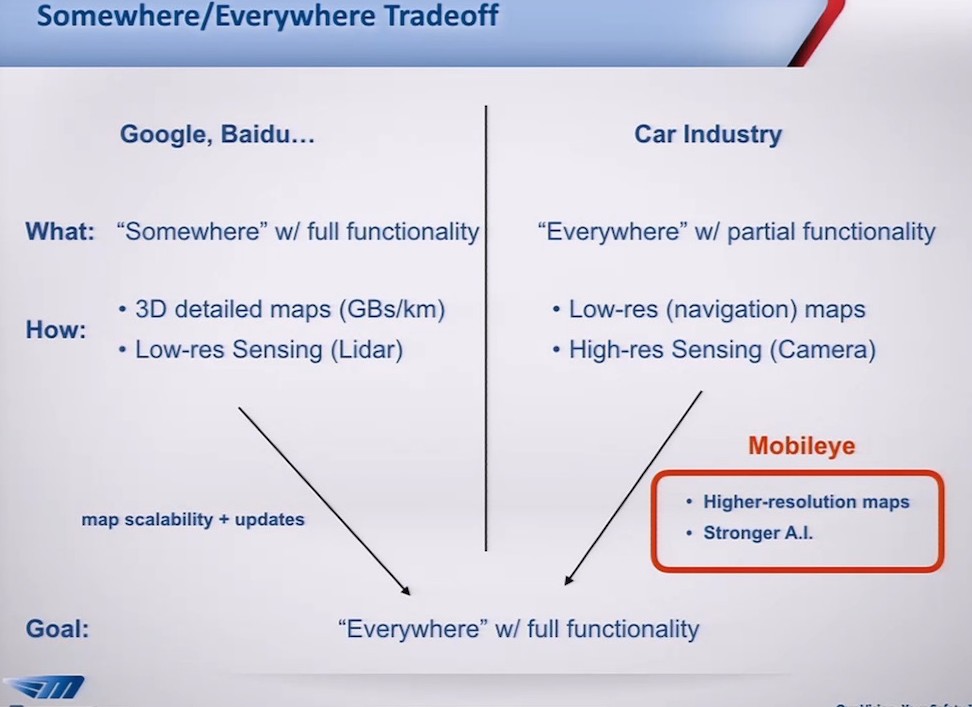
在 Mobileye 眼中,卖摄像头绝对不是目的,帮助车厂实现全自动驾驶才是终极目标。这个逻辑很容易看到,在 Shashua 看来现在所谓的无人驾驶分为两个阵营:以谷歌为主导的「Somewhere with fully functionally」阵营,和以传统汽车厂商为主导的「Everywhere with partial functionally」阵营。前者强调通过采集某一区域的高精度 3D 地图信息配合激光雷达在某一区域实现无人驾驶,后者则更强调「万无一失」的复杂传感器组合识别周围环境配备,并匹配低精度导航地图(当然现状会有所改变),能在任何区域实现无人驾驶。但终极愿景都是:「Everywhere with fully functionally」。
哪种更好?其实都有缺陷,前者需要不断地采集并更新实时高清地图(所采集的高精度 3D 厘米级地图会达到 3-4Gb/km),而后者的难点则在于更高精度的地图和更强的人工智能,因为从部分自动驾驶的功能实现到全部实现,需要更人性化更自然的驾驶方式,但汽车厂商并没有人工智能方面的基因,这可能会耗费他们 5 到 10 年的时间去实现终极目标。
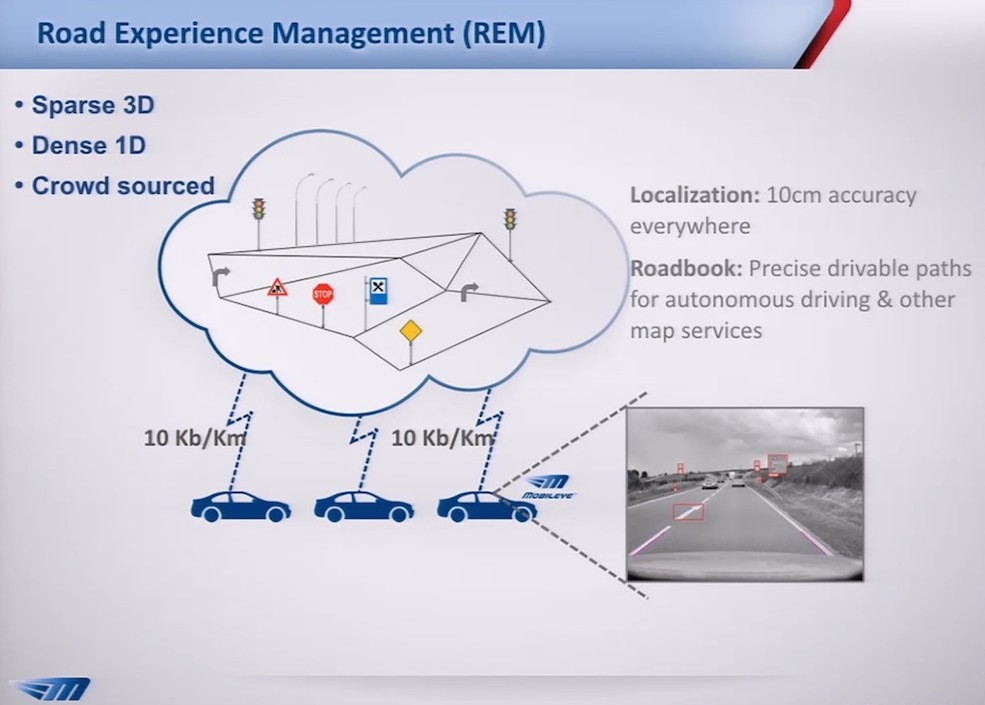
Mobileye 能做的,则是利用摄像头作为传感器,搭配人工智能、深度学习以及众包数据的方式获取高精度地图,并且大小只有 10Kb/km,来帮助汽车厂商完善和实现高清晰度地图。
站着说话永远不会腰疼,因为人工智能和深度学习需要经历无法想象的困难。
Shashua 将自动驾驶的主要因素分为三部分:传感器、匹配和决策。传感器用来采集 360°环境信息,建立「环境模型」。Mobileye 通过采集包括交通信号、方向指示牌、长方形指示牌、路灯及反光标等「地标」,得到一个简单的 3D 坐标数据;再通过识别车道线信息,路沿,隔离带等获取丰富的 1D 数据。把简单的 3D 数据和丰富的 1D 的数据加起来,大小也不过是 10Kb/km,相当于谷歌的高精度 3D 地图大小的百万分之一大小。于是 Mobileye 可以采集大量的数据,并且可以做众包数据采集,方便用户将大量的数据上传云端。
他们管这叫做:REM(Road Experience Management),路网采集管理,这些采集到的路标其实就构成了所谓的「RoadBook」(路书)。在我看来,这是 Mobileye 在自动驾驶这个赌局中的筹码之一。
「If you want to slow down our competitors, told them to use deep networks.」
上面这句话是 Mobileye 的工程师跟 Shashua 说的,足以表明人工智能和深度学习网络的难度令人发指。
Mobileye 目前几乎将全部精力都放在自动驾驶的决策上,实现途径是人工智能的深度学习模式,终极目标是通过大量数据的深度学习网络学习人类开车最自然的模式。当然,这个过程也并不顺利。
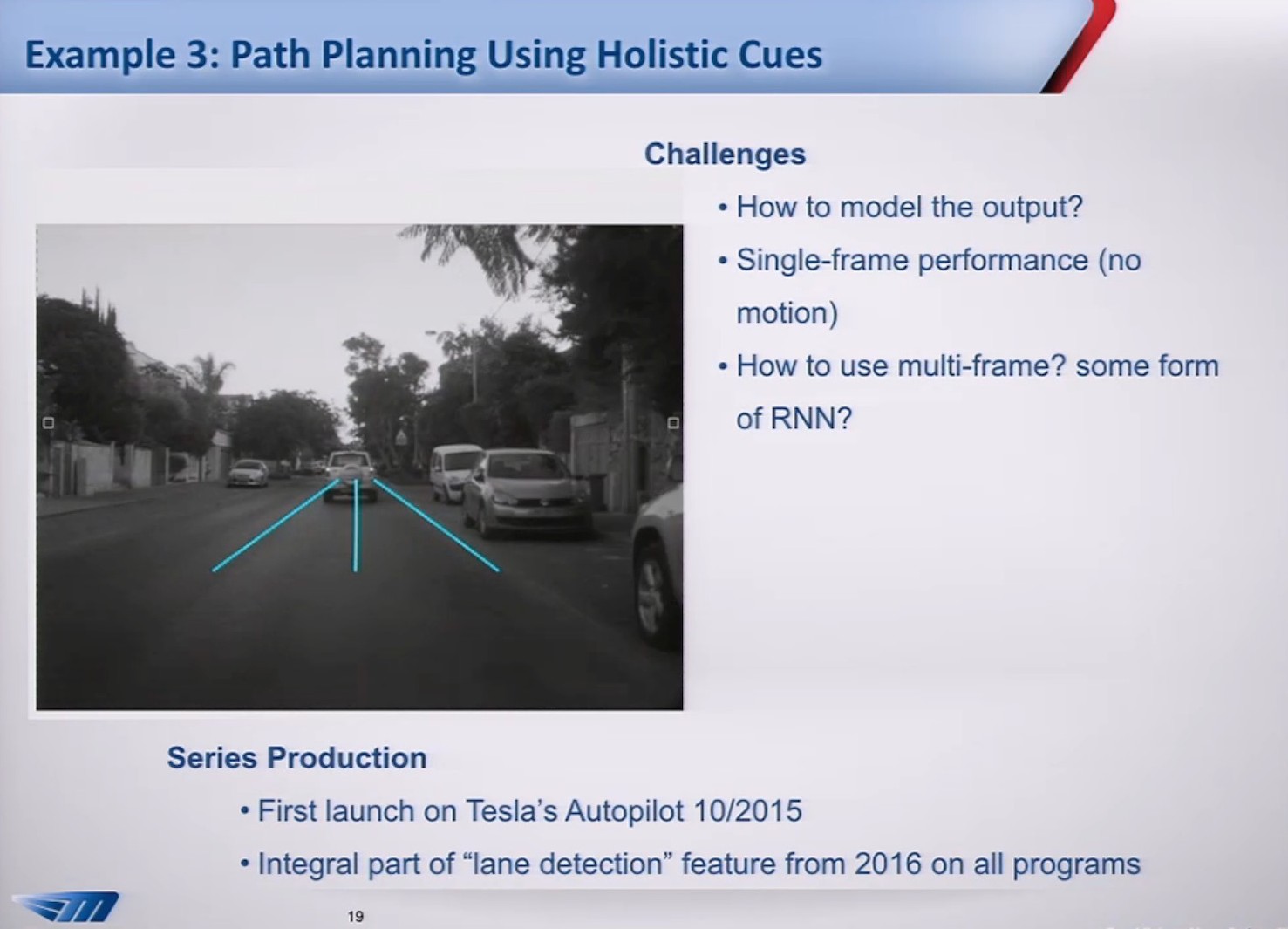
Shashua 现场举了几个例子说明人工智能和深度学习在自动驾驶领域的重要性和难度。例如通过像素标记的方式得知开放道路的范围(车辆可以通过边界识别道路边缘,甚至可以在没有边界并且路面相同的停车场识别出哪个是可通行路线,哪个是停车位)、以及利用完整线索进行的车道规划等(当行驶道路上没有车道线时,保持车辆稳定行驶)。
Shashua 对于 Mobileye 在自动驾驶深度学习网络方面的能力十分自信,他认为做 demo 那 80%的工作非常简单,但如果想要做完后面的 20%,从 demo 到产品化,就像「从一个男孩成长到男人」。
Mobileye 的商业逻辑和产品价值
虽然有着极强的人工智能和地图数据采集能力,但 Mobileye 并没有选择和谷歌站在统一战线,而是选择和那些传统的大型汽车厂商进行合作,这里面体现着 Mobileye 更加长远的计划和目标,我想原因有几个:
1. 未来的自动驾驶需要几乎实时级别的数据传输,而类似谷歌那种每公里 3-4 个 Gb 的高精度 3D 地图数据采集量是不现实的。
2. 对于环境的识别以及数据处理,必须在车上完成,而不能依赖云端。(英伟达推出强大的 Drive PX 2 平台就是一个例子)
3. 这种摄像头采集路书+人工智能和深度学习网络的方式不会增加很多的硬件成本,可以应用在更多车型上。
4. 只有足够大量的车使用,反过来才可以越快的帮助 Mobileye 不断改进自己的自动驾驶算法,而只有和大型的传统汽车厂商合作才可以达到这个目标。
于是 Mobileye 和传统汽车厂商站到了一起,据 Shashua 透露,目前通用计划于 2016 年在他们的车上部署 REM,和安吉星进行互联通讯;大众已经签署备忘录或将在 2018 年使用 REM;而「one more thing」就是,还有另一个被他称作 XXX 的汽车厂商也将合作在 2018 年开始做 REM。这三个汽车厂商在 2014 年时,就可以覆盖全球三分之一的汽车存量。
看来 Mobileye 已经具备足够的信心和能力,铁了心要做自动驾驶领域领先的供应商,而就像 Shashua 所说,在人工智能和深度学习网络方面没有容易的事情,他们何时才能完成剩下的那 20%,从一个「男孩」成长为一个「男人」,或许几年后就可以见分晓。
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
同时欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)& 极市 (微信号:geeket)。


4 responses to “「CES 2016」Mobileye 自动驾驶技术路线及商业策略解析”