
看过 GeekCar 文章的同学应该知道,自动驾驶离不开感知、地图、决策以及控制这四个环节,而这四个环节依靠人工智能的深度学习才能更有效的实现。
在感知环节,既需要高精度地图定位,也需要摄像头、激光雷达等传感器捕捉环境数据,而通过深度学习则能更有效的识别、分析传感器画面。在决策和控制环节,机器在不同路况环境下模拟人的行为,深度学习可以帮助它优化决策。这其实就类似于人的大脑,而我们以前报道过的英伟达 DRIVE PX 2 正是在扮演这样一个角色。
但实际上,除了英伟达之外,国内有一家创业公司——地平线机器人公司(Horizon Robotics, Inc),也在做深度学习。这家由 200 多位工程师组成的创业公司,成立两年来,一直深耕于深度学习算法,并且从最底端技术研发开始,搭建自己的架构 IP。他们想做的是软件、算法、硬件一体的自动驾驶解决方案。
在刚刚过去的上海车展上,我们将地平线的余轶南博士请到 GeekCar 主办的人工智能论坛,和我们分享了地平线在自动驾驶中应用的深度学习算法。
汽车有强大的能源和空间,不只要对外部环境进行感知,还要对内部驾驶意愿进行交互,可以说汽车是 AI 机器人的载体。
地平线提供的是嵌入式人工智能解决方案,将 AI 同自动驾驶结合。他们的「汽车大脑」包括算法软件架构、芯片的编译器和运行时间库以及硬件,还有模拟训练后台支撑前端的业务和技术,所以可以执行包括感知、定位、语义环境重建以及运动预估在内的全站式工作。
余博士提出,他们设计这套算法有三个目标:
1. 神经网络可以被用户理解。
神经网络由于包含隐层,经常被人理解成黑盒子,如何理解神经网络成为关键。地平线现在在做的贝叶斯网络(Bayes Networks),是神经网络中和控制决策相关的技术。通过深度学习,摄像头、激光雷达、毫米波雷达对汽车周围环境进行感知收集数据,然后进行环境重建及运动预估,最后通过贝叶斯网络做决策,给出路径规划。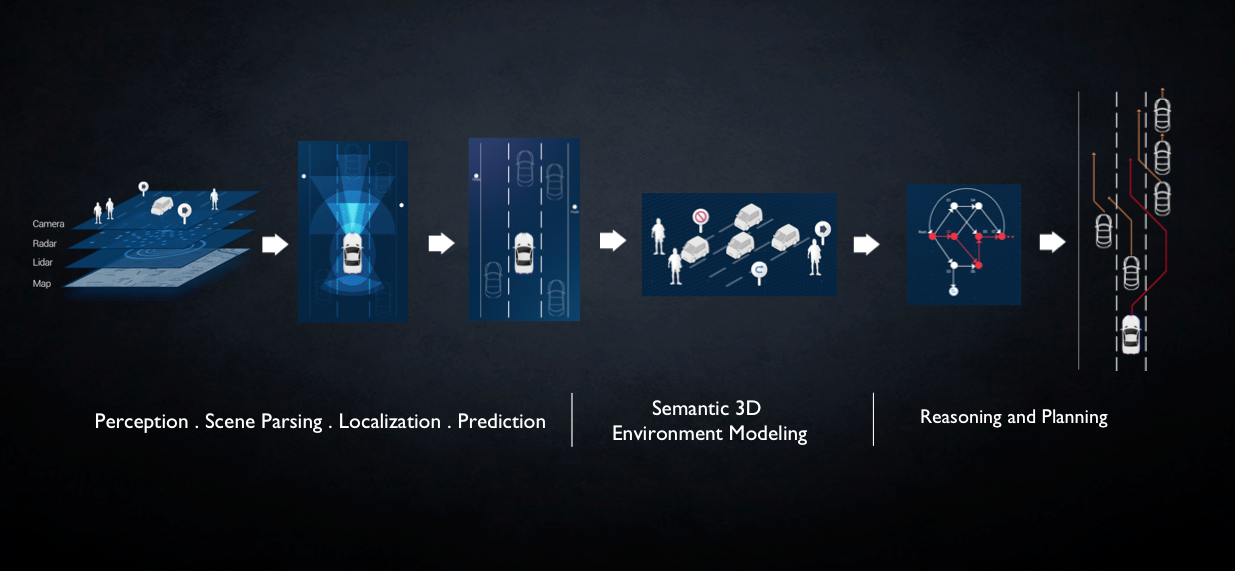
现在主流公司会使用深度学习加强化学习,做「端到端(end-to-end)」训练,从传感器的输入直接导出控制器的输出,这使得深度学习缺乏透明性。你能看到输入层和输出层的数据和决策,但不知道输入的数据运用什么样的算法形成输出层的决策。如果输出了错误的决策导致驾驶事故,你甚至不知道为什么会出事故,这样一来,再多的数据积累都没有意义。而且,端到端的训练仅仅依靠相关性推理,推出的结果有一定的盲目性,运用在驾驶中可能导致严重后果。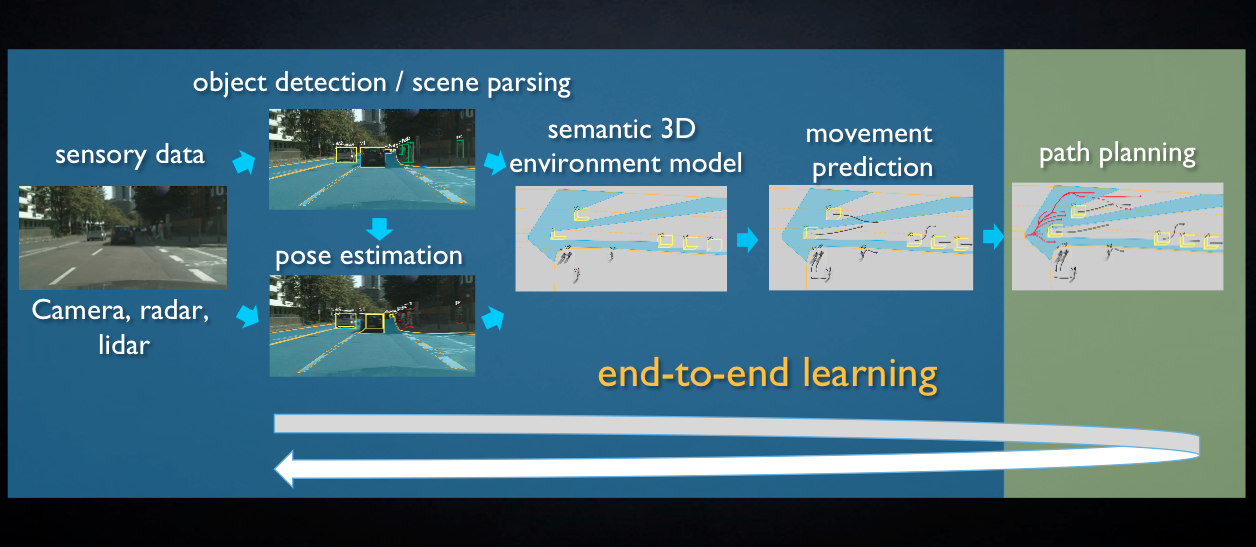
地平线在收集到感知数据后,会进行人工标注,配合激光雷达、 毫米波雷达进行三维标注,区分出车道、行人、周围车辆,然后建立 3D 仿真模型,进行模拟训练,还会做出运动估计。这些模块会单独做端到端的学习,而神经网络会把各个模块串起来,形成一个整体网络。这其中还可以加入专家模块,形成冗余路径,能增加输出的可靠性。同时,贝叶斯网络采用因果推理,使整个系统更加通透。你能够分析决策的过程,就能找出导致错误决策的原因然后修改。
2. 系统可以自适应学习。
汽车每天面临着各种各样的驾驶环境,很难在一开始收集庞大数据库去训练各个模块,所以需要在不停变化的环境中不断学习,既要学习人类的驾驶行为,还要进行仿真训练。不正确的驾驶行为导致一些后果之后,地平线会利用其收集到的大量数据在云端进行控制,让汽车更加 smart,避免再出现同类型事故。同时,他们不只要让车「被训练」,还要车内系统能够自适应学习。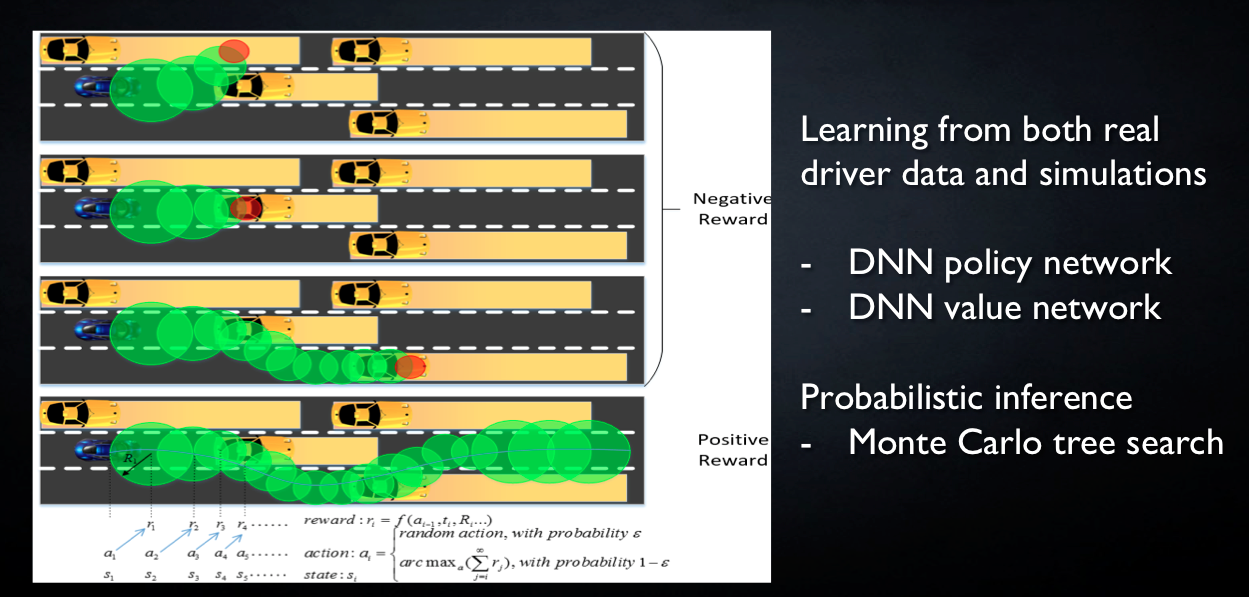
对自动驾驶来说,足够强大的前端做实时的强化学习以及强大的后台保证系统的学习,很重要。
3. 算法和硬件平台相互迭代优化,使计算平台更加高效、节能。
地平线认为芯片在自动驾驶中占据很重要的地位。之前他们的神经网络都是在 GPU 跑浮点模型,不过功耗非常大。所以,他们在神经网络结构稀疏化上做了很多努力,希望「在未来若干年,不增加计算量或在小功耗环境下,可以有更强大的计算能力和更好的效果。」
在年初的 CES 上,地平线和 Intel 联合推出 ADAS 系统。这套系统做了神经网络并联化和稀疏化,能耗低、运行快,能同时对车辆、行人、车道线和可行驶区域进行实时检测和识别,还能进行高密度的环境检测。他们曾在宇宙中心五道口进行过路测,利用他们的算法能准确的识别行人、汽车、街道、建筑、树木和标志。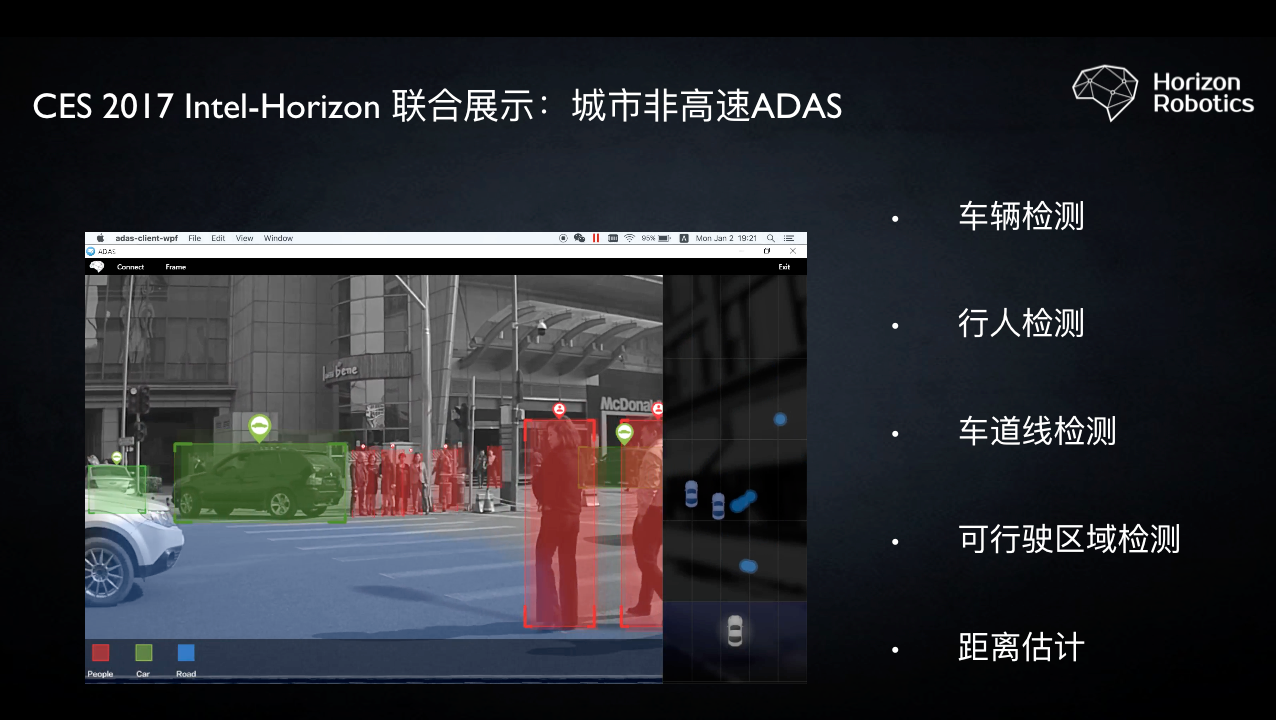
和计算机视觉不同,做自动驾驶的关键在于获得结构化场景,而且还要对汽车的应用学模型、动力学模型、定位有所了解。余博士表示,一直在做计算机视觉的他,转做自动驾驶有点「水土不服」。不过经过努力,地平线结合了车辆运动系统、语义感知,实现环境结构化,还能重建场景,使汽车运行更加游刃有余。并且算法优化可以直接在场景语义结构化中实现。
最后,余博士也表示平常机器训练更多用 GPU,前端 inference 会使用嵌入式结构。他们自己打造了低功耗的深度处理器 IP-- BPU(Brain Processor Unit),它将会有三代架构,分别是高斯架构、伯努利架构和贝叶斯架构。目前第一代架构已用于和 Intel 联合打造的 ADAS 系统,第二、三代架构正在研发中。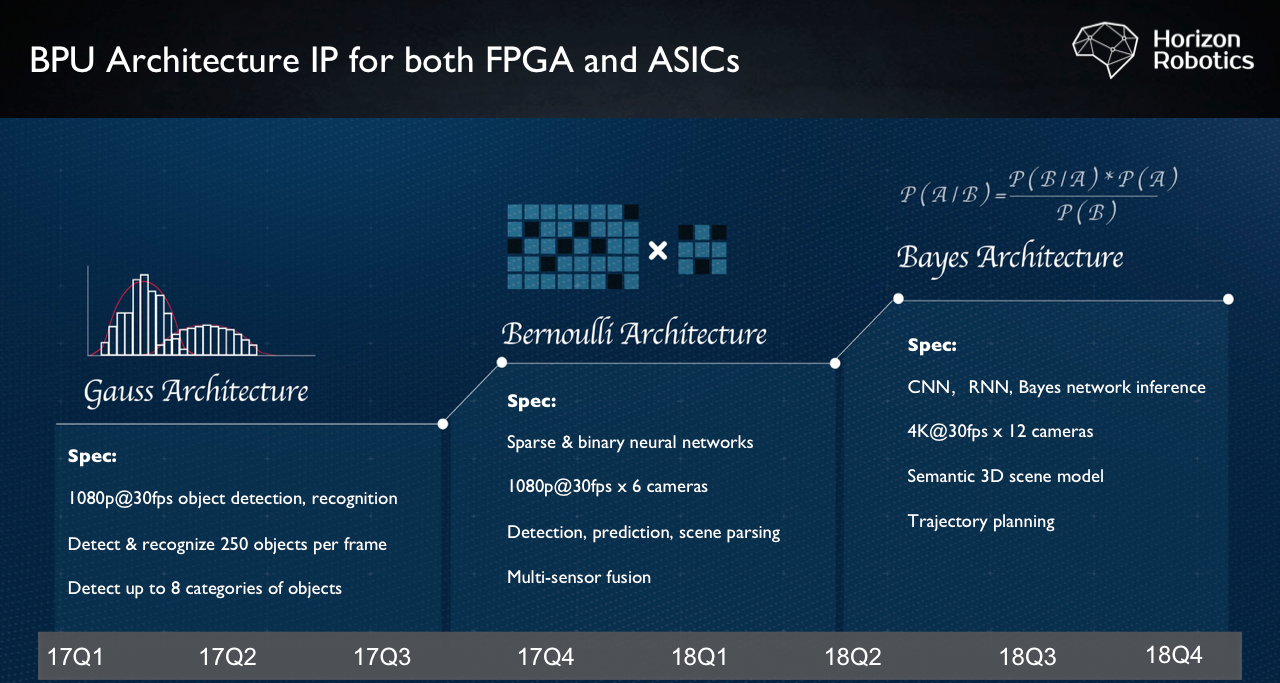
此前我们也报道过,地平线在上海安亭成立了研发中心,这将方便地平线进行自动驾驶技术的测试,加快研发进度,而且安亭的地理位置更有利于地平线和客户进行接洽,让技术更快落地,实现商品化。
在自动驾驶时代,汽车将成为一个移动数据中心,数据的计算、处理能力将尤为重要。深度学习网络隐层、系统自适应学习以及降低计算功耗是地平线的深度学习算法的目标,也是当前自动驾驶研发亟需解决的问题。
目前,自动驾驶巨头在中国的数据积累几乎为空白,针对中国驾驶场景的算法优化也没有明显的优势,地平线可能也正是看中了这一点,所以一直深耕深度学习算法。不过,他们能不能在巨头进入、瓜分中国市场前积累优势,还要看他们的产品落地和数据积累情况。
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)& 极市 (微信号:geeket)。


