
我们现在都知道,量产车完全自动驾驶不是一蹴而就的,而现在量产车上的高级辅助驾驶功能,可以被整体归为 L2 级别。但是,各个品牌为了保证自己的驾驶辅助系统有足够的差异化竞争力,往往会在基础 L2 的基础上提供一些特色功能。比如宝马有 60km/h 城市路段解放双手,凯迪拉克有高速公路解放双手(Super Cruise),特斯拉则有 NOA——Navigate on Autopilot——基于导航的自动驾驶。
而蔚来则在北京车展期间正式发布了 NIO Pilot 的 NOP(Navigate on Pilot)功能。从名字就能看出来,这是一个类似特斯拉 NOA 的功能。

具体来说,它可以基于导航规划的路线,在结构化道路(高架、高速公路)上实现自动变道超车、自动进出匝道。
GeekCar 在北京车展之前参加了 NOP 的全国首试,如今保密期已过,终于可以给大家分享它的方方面面信息。

首先,需要明确的是,虽然 NOP 和 NOA 在功能上类似,虽然蔚来肯定或多或少借鉴了 NOA 的经验,但这个 NOP 功能确实是蔚来自主研发的。特斯拉和蔚来也是目前为止全球唯二提供这种功能的车企。
虽然有特斯拉的经验在前,但要想把这样的功能做到「能用」的程度,还是挺麻烦的。以自动变道超车为例,我们自己驾驶的时候,很多人尚且不知道如何在合适的时机做出流畅的变道超车动作,对于电脑来说,这更不容易。
而 NOA 在我看来就有这样那样的问题:驶出匝道严格按限速进行调速,导致乘坐体验不佳以及被追尾的安全隐患;自动变道超车无法准确判断车流,导致 NOA 状态下通行效率变低;不适用于很多城市内高架或环路,导致功能使用频率不高,等等。

有 NOA 的体验打底,NOP 是有机会做得更好的。经过在北京几十公里的体验,我觉得初步来看它做到了。当然必须说明的是,不管是特斯拉的 NOA 还是蔚来的 NOP,都有持续进化的可能性,因此我的结论只适用于当下。
NOP 比 NOA 多了什么?一个是高精地图,一个是本土化。
在 NOP 里,加入了由百度提供的高精地图。它可以做到车道级导航,以及更精准的定位能力。高精地图包括了车道、道路曲率、坡度、交通标志、道路设施等信息。一方面,它可以作为一个「传感器」,和前向摄像头、毫米波雷达一起让车辆拥有更好的感知能力,另一方面,它可以帮助车辆执行机构更好地做出预判和动作执行。
而本土化,是 NIO Pilot 一直以来的特点之一。Autopilot 确实实力强大,但对于中国车企来说,研究中国路况和驾驶场景,以此来做出更适合中国用户的辅助驾驶系统,则应该是发力方向之一。

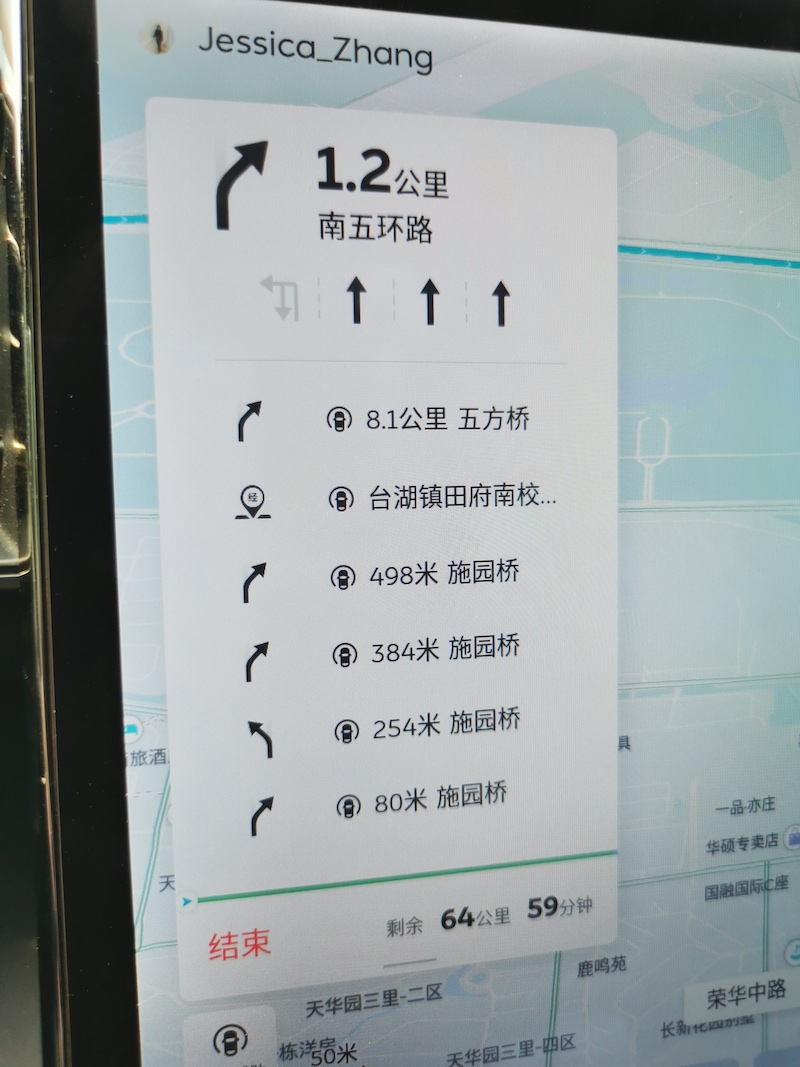
NOP 有哪些细节体现了本土化特色?比如自动驶出匝道的设计逻辑。在高速公路主路上,速度通常是 100-120km/h,而很多匝道的限速则是 40-60km/h,按照特斯拉的逻辑,往往会在临近匝道时突然变道,同时把速度从 100/120 降到 40/60,整个过程很短暂,体验算不上好。蔚来则是在距离驶出匝道 2km 左右时就开始向右侧车道变道,然后在匝道上并不会严格按照路牌限速行驶(比如 40km/h),而是会保持在 60km/h 左右经过匝道。当然,即时速度也取决于道路曲率,这时高精地图就可以发挥作用了。
这样设计的结果就是,整个驶出匝道的过程会相对比较流畅。

至于自动变道超车这个功能,NOP 设计了两种方式:打转向灯自动变道,或者不打转向灯自动变道,在系统里可以进行设置。如果设置成不打转向灯变道,车辆会在寻找到合适的超车时机时自动打转向灯自动变道。

以我这种老司机的标准来看,NOP 的自动变道显然还有些稚嫩,比如在汇入主路时,当主路车辆车速普遍较快时,它就迟迟不能变道。
但总体来说,NOP 的自动变道超车还算是「可用」的。

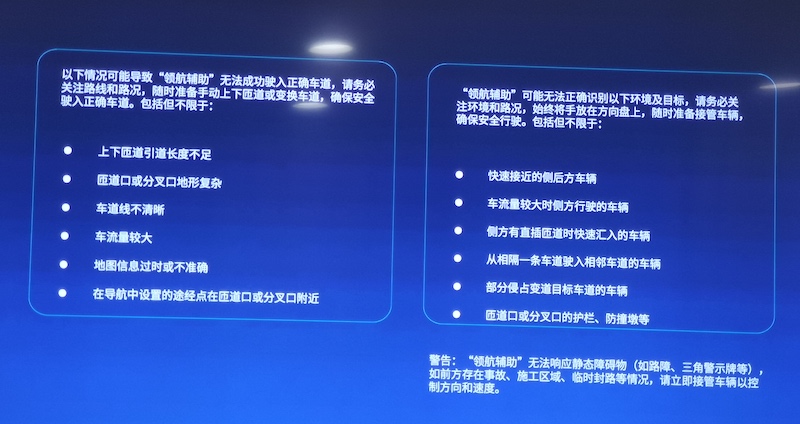
用 NOP 在北京五环、六环上跑了 50 多公里,如果不是追求极致通行效率,NOP 可以在很大程度上自主处理好整个行程,被迫手动接管的次数并不多。当然,和 NIO Pilot 的其他功能一样,在使用 NOP 时,你的双手也不能完全脱离方向盘,而是要时刻注意保持对车辆的控制权。
一句话总结:加入 NOP 功能之后,NIO Pilot 的整体体验和竞争力都有了大幅提升。之前长途试驾凯迪拉克 Super Cruise 时,我有一个结论:使用其他驾驶辅助系统,我会觉得自己仍然是一个「司机」,而 Super Cruise 让我坐在驾驶座上感觉像是一个「乘客」,而现在蔚来 NOP 多多少少也有点儿这种感觉了。
最后,再来理性探讨两个问题:
1. 特斯拉是不是给国内车企带偏了路?
我认为,某种意义上是这样。比如 NOP 的研发,就是蔚来的计划外项目,为的就是对标 NOA。而在我看来,不管是 NOA 还是 NOP,这种「基于导航的自动辅助驾驶」,其实并不是一个好的发力方向。在自动变道超车和自动进出匝道这两个场景里,它们要面对和处理的非标准化情况太多太多了,研发投入和体验产出很难成正比。
但蔚来已经做了,并且做得还不错,还算是努力没有白费。但对国内车企来说,特斯拉已经做的,未必就全是对的,更不应该盲目跟进。
2. 蔚来这套基于 EyeQ4 的 NIO Pilot,还有多大潜力可挖?
我认为,蔚来 NP1 平台的辅助驾驶系统,应该没有太多潜在功能可开拓了。举个例子:文章开头说到了凯迪拉克和宝马的解放双手辅助驾驶功能,但它们实现的前提是一套 NB 的驾驶员注意力监控系统,也就是 DMS。蔚来的 ES6 和 ES8 在后视镜上也集成了 DMS 摄像头,但是从我的使用感受来看,它不足以承担起解放双手的注意力监控任务。因此,要在 NP1 平台上实现类似的功能,可能有些难度。
另一方面,和蔚来自动驾驶团队交流时,他们释放的信号很明确:安全第一,不会为了追求功能的多样性而把安全置之度外。这也是和特斯拉 Autopilot 截然不同的产品理念。
所以,还是期待蔚来新平台、新自动驾驶硬件所带来的更多功能吧。但至少目前为止,NOP 是值得一吹的。