
令人迷惑的 EVA 联名款机甲龙,「四颗以下请别说话」的高调传播文案。
沙龙汽车,这个品牌自 2021 年广州车展问世以来就伴随着诸多质疑,有人认为它在智能驾驶层面上「盲目自信」,有人认为它在设计上「无病呻吟」。此次成都车展,我又试图去看懂沙龙汽车和机甲龙。结果是好的,通过与沙龙汽车 CEO 文飞和智能化中心高级总监杨继峰的沟通,解开了我心中许多的不解。
堆砌感知硬件的目的是什么?
说实话,关于智能驾驶,沙龙汽车在机甲龙上传递信息实在是过于庞大,晦涩的名词也颇多,为了更方便大家了解,我还是从智能驾驶最核心的三步:感知、决策、执行,来拆解沙龙的核心技术与布局。
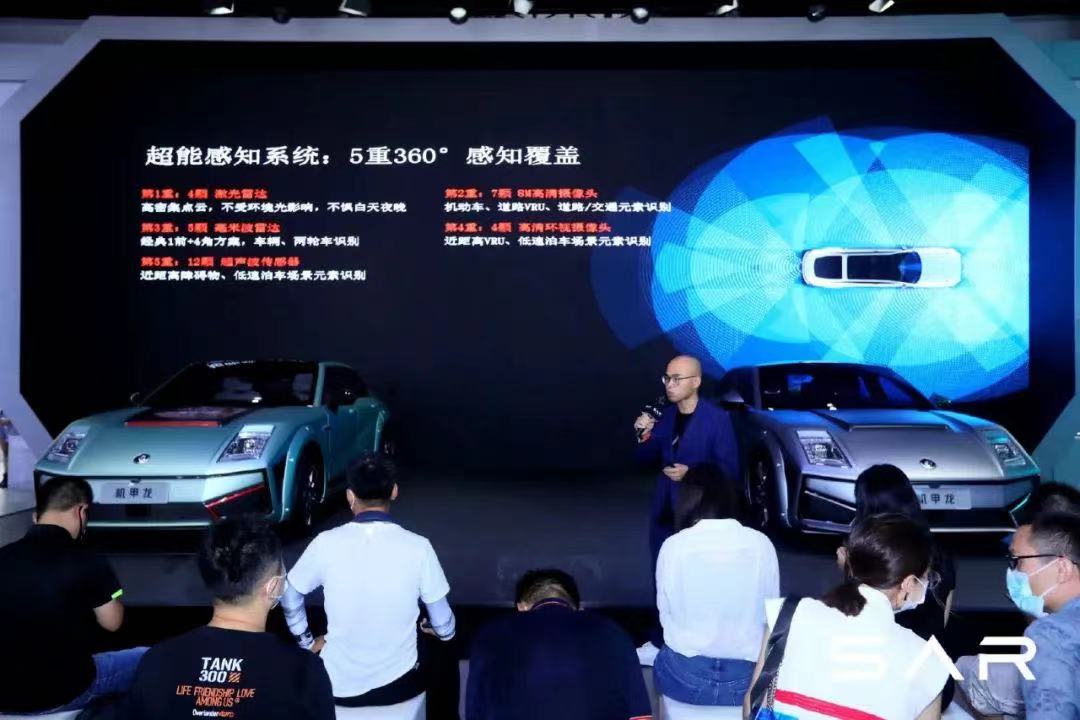
感知层面上,沙龙汽车在行业内首次提出了 5 重 360 度感知的概念,5 重分别是:
第 1 重:4 颗激光雷达
第 2 重:7 颗 8M 高清摄像头
第 3 重:5 颗毫米波雷达
第 4 重:4 颗高清环视摄像头
第 5 重:12 颗 超声波传感器
总共 32 颗传感器,就传感器数量来说,的确是行业内首屈一指的存在。同时也因为相对激进的做法,被外界所质疑「是否需要激光雷达覆盖 360 度的感知范围?」。因为我们常见的高阶感知硬件解决方案中,普遍布置 1-2 个激光雷达,通常用于增强前向感知。
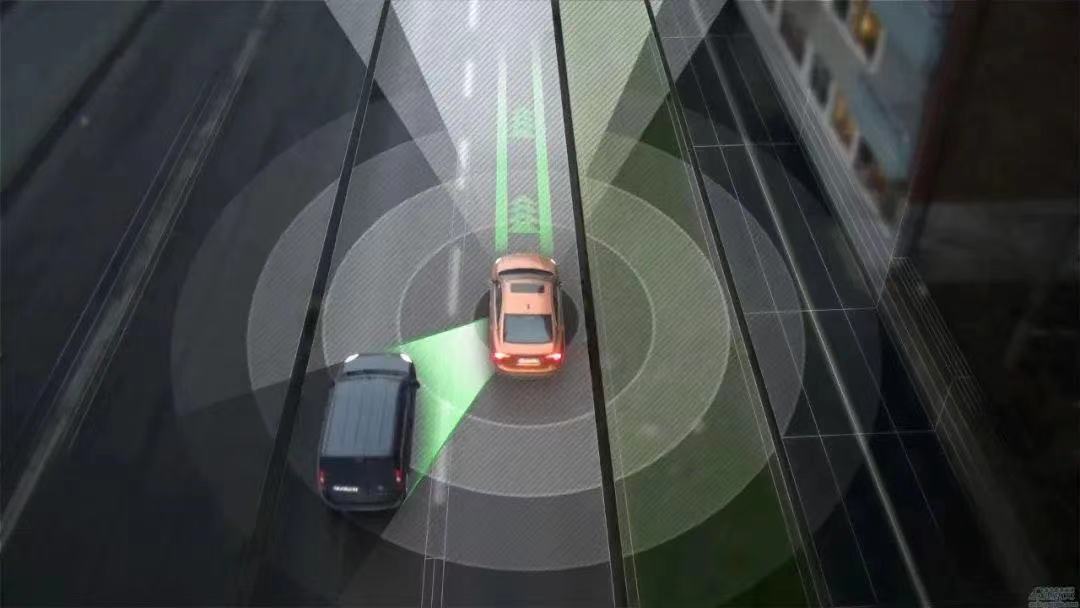
表层上,沙龙汽车的感知硬件方案与其他车企不同在于感知范围;实际上最大的不同在于,沙龙利用 96 线激光雷达所构建了 360 度均匀分布的点云,而其他单/双激光雷达的方案,主要通过激光雷达增强对 ROI(多边形边界)重点区域的探测。

我们可以简单地将沙龙的做法理解为覆盖区域内「无边界探测」,其他的方案则仅针对前向敏感区域重点探测。与后者相比,360 度「无边界探测」的优势在于不会出现点云在中心区域过于密集而边缘稀疏的情况,也不存在视场拼接导致点云质量下降的问题。
当然,对于沙龙来说还有一个更为敏感的问题:后视激光雷达是否有必要?
在成都车展前期的沟通会中,杨继峰举出了两个后视激光雷达的使用场景,例如用户在使用循迹倒车功能时,拥有后视激光雷达的方案相较传统的摄像头配合毫米波雷达的方案,在探测物体的准确度上更高。同时,在正常驾驶场景中,后视激光雷达对后方来车的预测感知能力更强。
除此之外,杨继峰还提出了另外一个观点:「过去在功能车时代,我们都是某个固定硬件集成固定软件实现了某些固定功能,以软件包或者功能方案的形式交付就好了。但是现阶段的智能汽车的产品本质上是一个平台,是一个技术栈,这个技术栈的设计过程中既考虑更长生命周期的感知硬件能力、计算平台算力和架构能力、EEA 的系统架构能力,也包括在这个平台上持续开发迭代的研发闭环和持续的 OTA 交付能力。这是个本质上的区别。」
我们能明显看到的是,在激光雷达上车之前,早期的 L2 级辅助驾驶功能到现如今的 L2+,所走的路径便是以「功能叠加」来凸显产品力的进步。例如在 ACC+车道保持的基础功能之上,加入拨杆变道、高速领航辅助等等。就目前的形势来看,激光雷达的入场并不能带来实质性的功能提升。
例如蔚来,我们本以为激光雷达上车后会推进 NOP 城市领航辅助的落地,实际上该功能还是一次又一次的跳票,索性蔚来就将激光雷达的数据融入了已有功能的感知体系当中。
激光雷达并不能让智能驾驶辅助更智能,它的职责是作为高精度感知单元,更为敏锐地探测波诡云谲的路面状况。
面向高阶智能驾驶时代,ODD(设计运行范围) 更多以 地理围栏 的形式出现而非功能边界。我认为这就是沙龙布局 4 颗激光雷达核心原因,更强的硬件对应了功能层面上也有着更高的天花板,不以堆功能为目的而以 L4 级智能驾驶为目标。
换句话说,在复杂的城市路段中,更多的高精度传感器也是对智能驾驶系统安全性的背书。当然,最优的解决办法还是在实现 L4 的同时,在传感器上做减法,但第一步还没走通时,我们又何谈最优解呢?

不过,沙龙给出的解决方案对于用户来说的确存在时间与成本的博弈。不能否认,更多的高精度传感器一定会带来成本增加,但在用户正常的用车周期内,能否依托激光雷达为用户的智驾体验带来质的突破?还是要打个非常大的问号。激光雷达这样的感知硬件成本与体验之间的投入产出比能否达到预期,也是用户所关心的。
「有灵魂的合作」
第二点我们来聊决策层,决策层牵扯两个关键要素:智能驾驶运算平台、智能驾驶算法。此次沙龙汽车在机甲龙上所采用的是双华为 MDC610 芯片,算力达 400TOPS。
当杨继峰被问及「沙龙是否自研智能驾驶算法」时,他是这样回答的,「大家很容易把复杂的『自研』这个问题思考成简单的 0-1 问题,比如是不是自研就代表着更灵活、更先进和更酷,还是经过多个产品验证的供应链合作伙伴反而意味着成熟可靠。这个问题本质上是作为一个定义要引领智能化的一个新品牌,我们要把哪些 know how 放在自己手里,要把哪些能力和责任放在自己手里。」
我们可以从两个角度上分析车企是否要自研智能驾驶算法这个问题。首先,细心观察智能汽车发展进程的朋友会发现,多数新创品牌在第一阶段的产品上会采用成熟供应商的解决方案,因为他们需要与时间赛跑,整车才是他们最终交付给用户的产品,所以细节的功能与配置会尽可能的交由专门的企业来做。
其次我们也会发现,如今的智能驾驶软、硬件供应商呈阶梯划分。例如老牌的博世,他们在毫米波雷达及基础 L2 级功能上的素质过硬;而类似华为、MOMENTA 这样的玩家,他们的路径是以 L2 为基础,致力于向 L4 突破。当然,在同样的路径上也有很多新势力车企选择自研算法,例如我们熟知的蔚小理。

同样作为新晋玩家的沙龙,如多数前辈一样,也选择了大量采用供应商方案来解决问题。不过,杨继峰认为与前人不同的是,他们与供应商的合作更有「灵魂」。
在沙龙汽车的智能驾驶解决方案中,我们会发现一个此前从没见过的名词,叫做「三重异构」。三重异构对应三套系统:
最底层的是智能前向安全系统,基于 IFC 前视摄像头和较为成熟的功能平台打造,实现前向碰撞预警、车道偏离预警、车道保持辅助等功能;
中间层是 L2 级辅助驾驶系统,基于博世的毫米波雷达解决方案,实现的功能则是些非常经典的 L2 级功能,例如 ACC、变道辅助、斜后方开门预警等等;
最高层是高阶人工智能自动驾驶系统,基于华为的硬件及 MOMENTA 的软件打造,这套系统的愿景很宏大,以全场景端到端的智能驾驶为终局。
与在智能驾驶端完全「出让灵魂」不同,沙龙的三重异构可以说是将目前市面上最稳定的系统与最前沿的系统进行整合。不仅具备自研算法的灵活、上限高的特点,而且具备供应商方案的成熟、稳定的特点。同时也解决了新晋造车品牌的第一阶段产品在智能驾驶功能上表现乏力的问题。
那么沙龙是简单地将三套系统堆叠在一起吗?实则不然,三套系统之间还存在相互补足、相互配合的逻辑。
举个例子来方便大家理解,例如我们驾车由北向南方向直行经过一个十字路口,而此时西向东方向上一车辆右转汇入我们前方。感知硬件识别车辆后,会分别向中间层的辅助驾驶系统和最高层的自动驾驶系统输出信号,辅助驾驶系统触发前横穿侧向警告并告知自动驾驶系统,在获得原始感知信号与下层功能的预警后,高阶自动驾驶系统进行最后的仲裁并输出最终命令给到执行层。
因为更强的算力与算法,高阶自动驾驶系统的决策权限更高,不仅能快速处理原始信号,同时也有下层系统的判定作为冗余来保证安全。

六大冗余保证执行端的安全性
最后我们来聊聊执行层。在智能驾驶系统开启阶段,执行层最可能面临的问题是系统故障导致无法执行决策层给出的指令,从而出现意外或事故。出于对系统安全性的考虑,沙龙汽车在六个极为关键的点上都设计了冗余系统,以保证系统正常运转。

通信冗余:任一通讯故障下均可完成通讯热切换,双接两路制动、转向、动力的线控通讯链路
感知冗余:激光雷达、高清摄像头、毫米波雷达、超声波传感器、高精地图、RTK 高精定位冗余感知
电源冗余:支持供电故障下智驾系统的独立安全控制
转向冗余:EPS 硬件采用双 CPU、双桥驱动、双绕组电机,任意单一回路故障,可提供至少 50%转向助力
控制冗余:双高性能智能驾驶计算平台支持单域控制器故障后的热切换安全机制
制动冗余:国内首个 IBC+RBC 双冗余制动,可实现机械冗余+电子冗余的双安全失效模式,可支持高级别自动驾驶
对机甲风格的思考
成都车展前夕,一位朋友去了位于成都银泰的售价沙龙汽车体验店,回来后他是这样评价的:「进入展厅后,一台极为怪异的紫绿配色机甲龙位列展厅中央,四周还有大比例模型和二次元手办,好像进入了一个中年男人的青春一样」。

是的,在与很多人沟通后我发现,机甲龙的造型确实不被多数人所接受,而此次与 EVA 的联名也被很多人不看好。但大众的声音对于沙龙汽车 CEO 文飞来说似乎没有那么重要,因为他很明确地告诉我们,机甲龙这款产品就是为小众群体所打造的,「发掘大众市场中存量只有 10%的小众市场,在小众市场中获得 90%的份额」这才是机甲龙的目标。

沙龙汽车采取自营的模式,并且他们的销售渠道也与高端、小众的定位呼应,集中在一线城市和具备强消费能力的准一线城市。
目前沙龙汽车已签约了 8 个门店位于北京、杭州、成都在内的 7 个城市。2022 年,沙龙汽车计划在 14 个城市建设 42 个网点,包括 28 家展厅和 14 个交付中心,到 2023 年,计划布局总共 160 个网点。
从另外一个角度上来看,造型和风格是一款产品的核心竞争力,但不是一家车企的核心竞争力,企业的核心竞争力更多地在于技术和运营能力。机甲龙是沙龙汽车的一次极为大胆的尝试,它可能挑战了大众审美,但销量未出之前我们还是无法妄下定论,毕竟小众的审美总是那么难以捉摸;更何况,成熟的智能化技术作为核心竞争力,能够支撑起品牌在风格和设计上不止一次的创新探索。
最后
这篇文章中,我们解析了沙龙那些「惊人」的举动背后的用意,希望能够帮助大家更好地理解这家企业。
未来我们也会持续关注这家企业,也希望看到他们解决感知硬件成本过度前置的问题,在智能驾驶端为用户带来质的突破。