
刚刚过去的中秋假期,你出门了吗?没有出门的人又因何选择在家「躺平」?
中秋假期前夕,老板约大家一同吃晚饭,给出了如下理由。
如果你日常通勤选择地上交通工具的话,需要为拥堵付出更多时间。但比拥堵更让人脑袋疼的,是到达目的地后因找不到停车位而带来的烦恼。长期生活于城市的朋友对于拥堵是有明确预期的,近些年来随着线上地图能力的提升,路线规划给出的时间也更加准确。但地图导航只能给到你到达目的地的时间,具体停车要花多长时间,还需要自己拿捏。
在出行规划中,多数人对于时间的预期都以到达目的地为准,停车花费的时间处于预期之外,而在多数情况下意外是最令人烦躁的事。并且墨菲定律总会出现在找车位的过程中,想必大家都有这样的体验,当你预感到停车会很困难时,一定会因为扩大搜寻车位的范围而浪费非常多的时间。
停车难是永恒的痛点
停车究竟有多难,我们可以拿北京作为背景。根据 2022 年底的数据,北京机动车保有量已经超过了 600 万台,而经过普查后得到的停车位数据仅有 400 万个,也就是说北京市内本就存在 200 万车位缺口。
在 400 万车位总数中,居住区及周边道路停车位共计 320 万个,面向商业区的停车位仅有 80 万个。看过这组数据,想必大家就会明白,为什么周末约朋友去核心商圈逛街总是找不到停车位了吧。

当然,为了解决商圈停车难的问题,多数商厦、写字楼会提供多层停车场以拓展停车空间。但用户在停车这件事上付出的时间仍然不减,其中最为核心的原因在于存在信息盲区。
按照正常的停车逻辑,停车场入口处与商场电梯位置的车位是最为紧缺的,所以停车密度呈多个点位向外蔓延的趋势,到停车高峰期时,空余车位完全是分散在多个点位之间的,而不是呈区域划分,这也导致大家搜寻车位需要花费更多时间。
为了消除类似的信息盲区,很多停车场会在入口处设置电子提示牌,告知用户每层还剩余多少车位,也会在车位上方设置了提示灯,为了让用户在远处就能发现空闲的车位。但人眼的可视距离是有限的,并且也无法获知其他楼层的准确车位信息。
怎样彻底消除信息盲区,同时让停车更便捷?
怎样停车体验最好?我认为莫过于五星级酒店提供的代课泊车服务,你只需要将车开到酒店门口,专门的停车员就会将你的车开走,剩下的事就不需要操心了。当然,这是在定下昂贵的房间之后才有的配套服务。
如何让人人都能享受到代客泊车一般的停车体验,这就是智能泊车技术所希望解决的问题。

在泊车这件事上,威马算得上最执拗的车企。为了解决停车问题,威马汽车曾推出过固定车位无人记忆代客泊车(HAVP)功能。以住所和公司的固定车位为场景,用户需要驾驶车辆走一遍停车路线,车辆将路线录入系统后,便可在之后的使用过程中按照路线自主泊车入位,用户只需在开启功能的位置下车即可。
不过,这项功能相对局限,因为有固定车位的场景并不是用户在日常用车过程中浪费时间最多的地方,而公共停车场才是最难解决的停车场景。
所以在今年 5 月,威马推出了第一代公共停车场无人免学习代客泊车智驾系统(PAVP)Beta 1.0 版。在数月的实地测试后,前不久威马汽车又迭代了公共停车场无人免学习代客泊车智驾系统(PAVP)Beta 2.0 版,新增多车协同、自主跨层功能。更新后的功能有两个关键词: 公共停车场、免学习 。
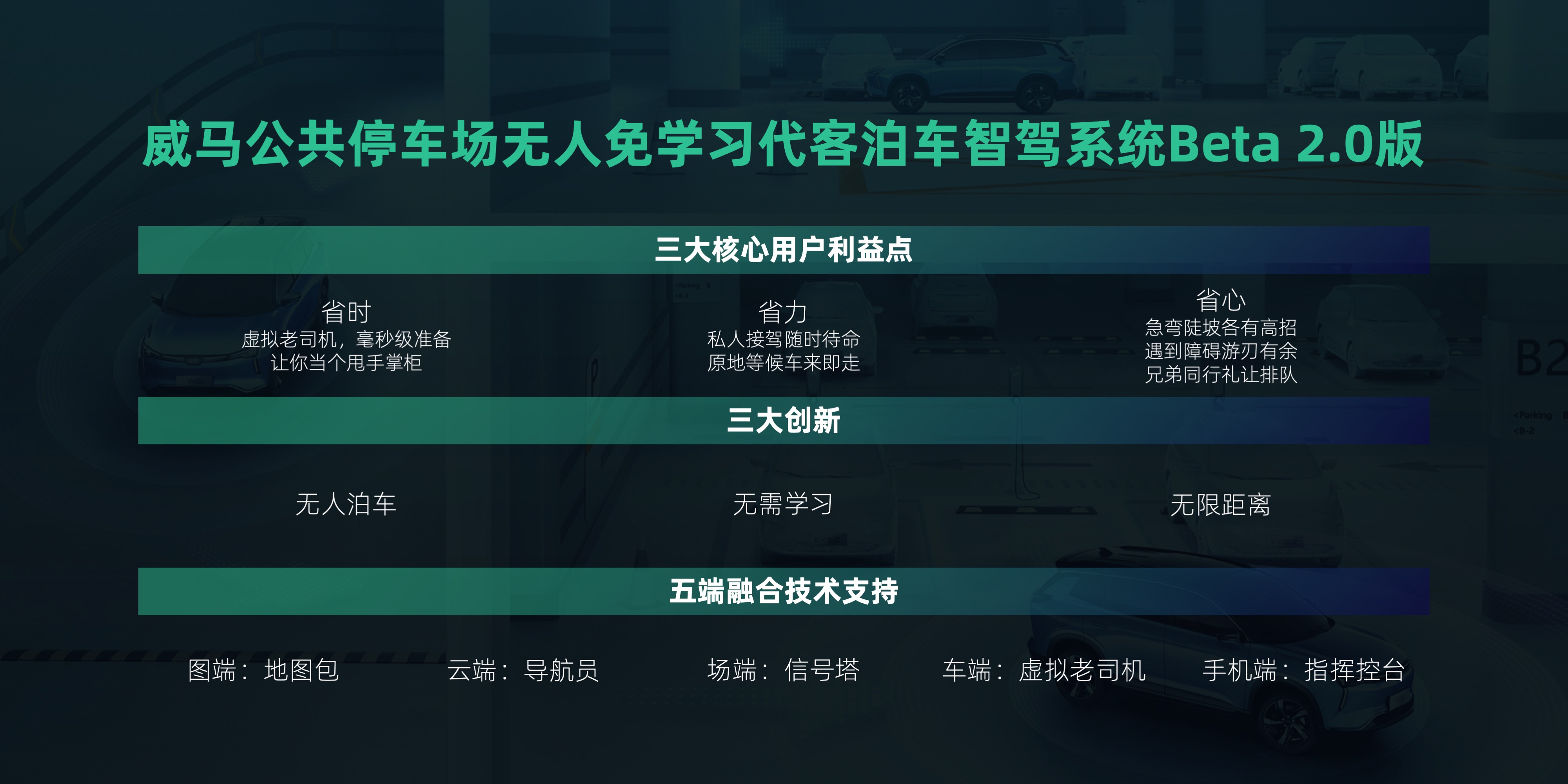
要实现公共停车场中的代客泊车功能,首要解决的问题便是消除信息盲区,那么场端的配套设施必不可少。适用于 PAVP 功能的停车场,其车道、停车位需要轻度改造并且补充必要标识。
另外,还需要图端和云端的配合,目前在威马 PAVP 系统中提供了能够精确到 15cm 的高精地图数据,用户接近具备高精地图的停车场后,系统会自动下载该停车场的地图数据,并且每个地图数据包都被压缩在了 10M 以内,并不会占用大量的车载空间与下载时间。同时高精地图数据支持跨楼层识别的能力。
Beta-2.0版」公开测试.jpg)
基于高精地图数据,车辆能够完成自动上下楼梯和跨越楼层的动作。车辆可以完成最大 15%坡度的同行,并且自主控制行车车速。

云端完成地图下发、停车场信息下发、车辆调度的三方面工作,在此方面,百度云会协同威马云工作。
同时车端在自动驾驶方面的底层能力也是不可或缺的,因为停车场内的复杂情况并不比道路上少。例如在泊车过程中,车辆很可能遇到横穿的行人、被承重墙挡住的视野盲区、狭窄的直角弯等场景。

所以在单车智能的能力上,威马与百度合作研发了自动驾驶计算平台,搭载了包括高清前视摄像头 x2、高清环视摄像头 x4、超声波雷达 x12、毫米波雷达 x5 在内的 23 个高精度传感器与惯性导航组合。
最终,用户可以直接用手机对车辆下达指令,并且手机 APP 中可以向用户反馈车辆在自动泊车时的实时渲染画面,让用户更清楚地知道车辆的实时状态。

在场端、图端、云端、车端、手机端的协作下,威马 PAVP 方案相较于市面上的已有方案具备两个显著的优势: 无需学习、无限距离 。用户指定地点下车后,点击手机端对应按键,车辆可自行行驶至停车位,并自动泊入,自动落锁。也能够让车辆自动上电泊出车位,前往指定地点接驾。

走出 Beta 还需多久?
虽然威马 PVAP Beta 2.0 版本已经推送车主开始公开测试,但 Beta 的标签还是格外醒目。无需学习的公共停车场代课泊车功能,在自动驾驶行业中还是较为前沿的技术,在我们刚才的介绍中,大家也不难发现,该项功能需要场端、云端、图端的多方配合,只有单车智能是无法实现的。
想要完全走出 Beta,跟进配套的基础设施和责任划分是关键。具体能够支持多少停车场与停车场的分布情况,这点威马并没有透露,当然,这件事并不能指着一家车企来推动。
需求是所有事物更新换代的原动力,对于停车场来说,有更多车企的合作需求进来才有更新基础设施的可能。对于车企来说,得到更多用户对该项功能的需求才有推动技术研发的动力。
就此看来,威马的 PAVP 功能实际上起到了开渠引流的作用,用户需要类似的创新者来激发他们的潜在需求,渠道挖开之后,才会有源源不断的水流汇入进来,共同推进行业的发展。