
自动驾驶时代,是终将到来的未来。以后的某一天,当你享受自动驾驶带来的便利时,可别忘了下面这些车。在历史上,它们都曾经推动了自动驾驶的发展。
「美国奇迹」
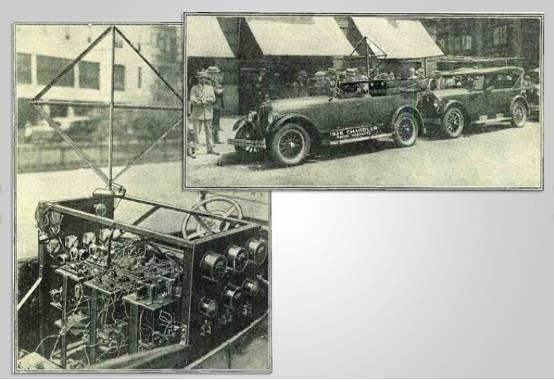 1925 年 8 月,美国的电子工程师 Francis P. Houdina 借了一辆卡车,开始了自己的无线电控制汽车的环美国之旅。这辆车叫「美国奇迹」,演示自动驾驶的时候,车子的「驾驶员」坐在紧跟在演示车后面的车子里,用无线电控制前面的车子。演示车可以在遥控下完成转弯,刹车,鸣笛等操作。为了展示这项技术,Houdina 在几年里走遍了美国。
1925 年 8 月,美国的电子工程师 Francis P. Houdina 借了一辆卡车,开始了自己的无线电控制汽车的环美国之旅。这辆车叫「美国奇迹」,演示自动驾驶的时候,车子的「驾驶员」坐在紧跟在演示车后面的车子里,用无线电控制前面的车子。演示车可以在遥控下完成转弯,刹车,鸣笛等操作。为了展示这项技术,Houdina 在几年里走遍了美国。
未来的高速公路

在 1939 年的世博会上,通用公司展示了未来高速公路概念设想。他们设想了 1960 年代的高速公路自动驾驶情景:车子走上高速路之后,就会启动自动驾驶模式,按照预设的「专属车道」行驶。
1956 年,在 Firebird II 号概念车上,通用第一次配备了汽车安全和自动导航系统。1958 年,Firebird III 号概念车已经可以进行实际公路的自动驾驶测试了。通用在地下预埋了可以发射脉冲信号的电缆线圈,以此和车辆通讯,实现了对车子的自动驾驶控制。
聪明的导航系统

1966 年,斯坦福研究院的人工智能中心研发了一台叫做 Shakey 的产品,它首次实现了在真实环境下自动导航的功能。虽然这台机器当时只能在室内的的道路上完成自主导航,但是它在传感器技术和软件算法方面,都具有里程碑式的意义。
比驾驶员更靠谱
 在 1971 年,英国道路研究实验室展示了一款和通用公司非常相似的产品。这辆车从外观上就能看出来是通过电脉冲系统来实现「自动驾驶」的,它初步实现了自动驾驶的基本功能。当年的科技媒体非常看好这套系统,称它比真人驾驶的车辆安全 100 倍。
在 1971 年,英国道路研究实验室展示了一款和通用公司非常相似的产品。这辆车从外观上就能看出来是通过电脉冲系统来实现「自动驾驶」的,它初步实现了自动驾驶的基本功能。当年的科技媒体非常看好这套系统,称它比真人驾驶的车辆安全 100 倍。
用摄像头代替脉冲信号
 1977 年,日本筑波工程实验室研发出了世界上第一台基于摄像头来检测前方路况实现导航的自动驾驶汽车,以前通过脉冲信号进行自动驾驶控制的方式被革新了。这辆车可以通过摄像头,检测到道路上的白色标记来确定前进线路,不再需要提前把脉冲发射器埋在路面里了。
1977 年,日本筑波工程实验室研发出了世界上第一台基于摄像头来检测前方路况实现导航的自动驾驶汽车,以前通过脉冲信号进行自动驾驶控制的方式被革新了。这辆车可以通过摄像头,检测到道路上的白色标记来确定前进线路,不再需要提前把脉冲发射器埋在路面里了。
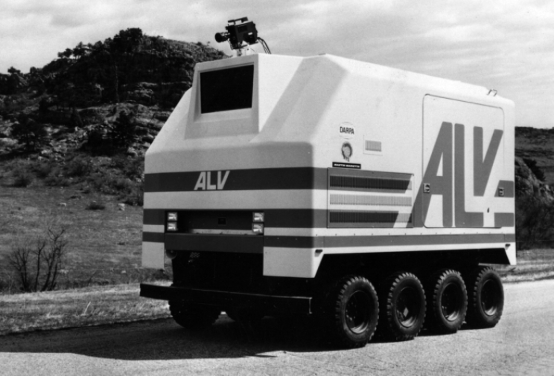
1983 年,DARPA 的 ALV(Automated Land Vehicle)项目也是类似,他们让车子拥有高度的自主权,通过摄像头检测地形,然后计算导航方案。
动态视觉
 慕尼黑联邦大学的 Ernst Dickmanns 教授,在上个世纪 70~80 年代,开始研究动态的机器视觉系统。他和他的研发团队陆续开发了几辆试验用车。
慕尼黑联邦大学的 Ernst Dickmanns 教授,在上个世纪 70~80 年代,开始研究动态的机器视觉系统。他和他的研发团队陆续开发了几辆试验用车。
团队第一次取得重大突破是在 1993~1994 年。在一个和奔驰合作的项目里,他们使用奔驰 500SEL 车型完成了一次 1000 公里的高速公路自动驾驶实验。他们也是通过摄像头以及其他多种传感器来实现自动驾驶的。
移动运算
 卡内基梅隆大学从 1986 年开始研究自动导航系统。他们改装的一台雪佛兰汽车,命名为 Navlab 1,在这辆车的车厢里,装有五台运算设备,以此实现自我控制。但是它的前进速度只有 32km/h。
卡内基梅隆大学从 1986 年开始研究自动导航系统。他们改装的一台雪佛兰汽车,命名为 Navlab 1,在这辆车的车厢里,装有五台运算设备,以此实现自我控制。但是它的前进速度只有 32km/h。
他们代号为「Navlab 5」的车子是一辆由别人捐赠的庞蒂亚克,车子上的 PANS( Portable Advanced Navigation System)系统可以用来定位、控制转向和监控安全。
廉价解决方案
 ARGO 是意大利帕尔玛大学参与的一个项目。他们的实验车和之前的自动驾驶车一样,也是使用立体摄像机来获取周边环境信息,从而规划出导航路线的。
ARGO 是意大利帕尔玛大学参与的一个项目。他们的实验车和之前的自动驾驶车一样,也是使用立体摄像机来获取周边环境信息,从而规划出导航路线的。
这辆车在 1998 年完成了一次 2000 公里的自动驾驶之旅。这证明了,使用廉价硬件和摄像头来完成自动驾驶与导航是可行的。
DARPA 挑战赛
 这个比赛应该很多人知道,我们 GeekCar 也专门写文章进行过介绍。第一届 DARPA 自动驾驶挑战在 2004 年举行,遗憾的是当年没有一只参赛队完赛。2005 年,斯坦福大学使用一辆大众途锐,跑完了全部比赛路程。这辆车不仅仅有摄像识别系统,还包括激光测距仪、长波雷达、GPS,以及几块奔腾 M 架构的主板。
这个比赛应该很多人知道,我们 GeekCar 也专门写文章进行过介绍。第一届 DARPA 自动驾驶挑战在 2004 年举行,遗憾的是当年没有一只参赛队完赛。2005 年,斯坦福大学使用一辆大众途锐,跑完了全部比赛路程。这辆车不仅仅有摄像识别系统,还包括激光测距仪、长波雷达、GPS,以及几块奔腾 M 架构的主板。
在城市中驾驶
 三年之后的 DARPA 挑战赛,场地从沙漠变成了城市。这次斯坦福大学的车队获得了第二名,Tartan Racing 得了第一。卡耐基梅隆大学也在那届比赛里确立了自己在自动驾驶领域的地位。
三年之后的 DARPA 挑战赛,场地从沙漠变成了城市。这次斯坦福大学的车队获得了第二名,Tartan Racing 得了第一。卡耐基梅隆大学也在那届比赛里确立了自己在自动驾驶领域的地位。
自动驾驶车的「工作」越来越复杂:它需要像人类驾驶员一样,处理和其他车辆的关系、识别交通信号、躲避障碍,等等。
 2009 年,在支持了其他车辆参加 DARPA 挑战赛之后,Google 推出了自己的自动驾驶研究项目。到 2010 年,包括丰田普锐斯在内的众多车辆,已经在太平洋沿岸的街道上行驶了 14 万英里。他们团队里的许多人,都来自于 2005 和 2007 年 DARPA 挑战赛的冠军队。大计划就这么开始了。
2009 年,在支持了其他车辆参加 DARPA 挑战赛之后,Google 推出了自己的自动驾驶研究项目。到 2010 年,包括丰田普锐斯在内的众多车辆,已经在太平洋沿岸的街道上行驶了 14 万英里。他们团队里的许多人,都来自于 2005 和 2007 年 DARPA 挑战赛的冠军队。大计划就这么开始了。
自动驾驶的洲际旅行
 在 2010 年,几辆自动驾驶车,从意大利帕尔玛出发,一路到了上海,总行程 1.3 万公里。这些车来自于意大利 Vislab 团队,车子导航系统使用的电力,全部来自于车顶的太阳能板。
在 2010 年,几辆自动驾驶车,从意大利帕尔玛出发,一路到了上海,总行程 1.3 万公里。这些车来自于意大利 Vislab 团队,车子导航系统使用的电力,全部来自于车顶的太阳能板。
聪明的摆渡车
 法国的 Induct 公司研发了一款叫做 Navia shuttle 的小车。这辆车适合在校园里或者停车场里作为摆渡车使用,车子使用激光雷达传感器来感知周围环境,并且具备行驶线路自学习功能,最高车速为 20km/h。
法国的 Induct 公司研发了一款叫做 Navia shuttle 的小车。这辆车适合在校园里或者停车场里作为摆渡车使用,车子使用激光雷达传感器来感知周围环境,并且具备行驶线路自学习功能,最高车速为 20km/h。
Google 无人驾驶车
 这辆车的故事我们都知道了。2014 年,谷歌推出这个计划,2015 年,第一款原型车上路测试。这辆车没有方向盘,乘客只需要坐进车里,就能享受无人驾驶带来的方便了。
这辆车的故事我们都知道了。2014 年,谷歌推出这个计划,2015 年,第一款原型车上路测试。这辆车没有方向盘,乘客只需要坐进车里,就能享受无人驾驶带来的方便了。
未来之车
 现在,传统汽车厂商也在积极的研发无人驾驶汽车。这辆奔驰的 F 015 我们已经熟的不能再熟了。遍布车内的显示屏,可以旋转的座椅,这就是未来自动驾驶汽车的样子吗?
现在,传统汽车厂商也在积极的研发无人驾驶汽车。这辆奔驰的 F 015 我们已经熟的不能再熟了。遍布车内的显示屏,可以旋转的座椅,这就是未来自动驾驶汽车的样子吗?
(编译自 engadget)
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)& 极市 (微信号:geeket)。



One response to “这几辆车,推动了自动驾驶技术的发展”