
在特斯拉的 7.0 固件里,Autopilot 功能的升级是最大的变化,也就是人们说的「自动驾驶」。那么,它到底是不是自动驾驶呢?开起来又是什么感觉?昨天,我们到特斯拉位于北京亦庄的服务中心去试驾体验了一下。
实际上,不管是国内还是国外,体验过 Autopilot 功能的人已经有很多了,类似的文章也很多,但是我想这篇文章应该能让你对特斯拉的自动驾驶功能有一个更深入的了解。
实现原理
说试驾感受之前,还是得说说 Autopilot 的原理。
从硬件上来说,特斯拉的 Autopilot 所依靠的硬件如下:一个前视摄像头(供应商是 Mobileye)、车身上的 12 个雷达(前后保险杠各 6 个)、一个超声波雷达(位于前牌照框下方)。

在带有高级驾驶辅助系统(ADAS)的车型里,这个配置算高的(主要是前后雷达的数量,奔驰 S 级也是 12 个),但是和 Google 无人车比,还是少了很多东西,比如激光雷达。 事实上,特斯拉的这套 Autopilot 系统,你可以理解为「更高级的高级驾驶辅助系统」。
如果把 Autopilot 的功能分拆来看,它实际上是由自适应巡航、主动车道保持、自动变道、自动泊车四部分组成的。
所以如果你问 Autopilot 的实现原理到底是什么,主动车道保持实际上依靠的是前摄像头识别车道线,在识别当前车道线和旁边车道线的基础上,通过前后雷达探测车子周边,又为自动变道扫清了障碍。而自适应巡航应该不用给你解释了。
了解了原理,对于这套系统的实际表现,之前体验过类似功能的同学,其实应该已经能有所预期了。
实际表现:功能设置更合理
之前我试过其他一些带有 ADAS 功能的车子,所以我看的更多是那些车和 Model S 的横向比较。给我的感受是,Autopilot 实现了更好的用户体验,不会像其他的 ADAS 系统那样,给人或多或少「别扭」或者「不合理」的感觉。
先说说人机交互。升级了 7.0 系统之后,仪表盘液晶屏为 Autopilot 做了很多优化。一辆小车在路上行驶的画面可以很直观的反映出车辆状态、车道线信息等。Autopilot 的自适应巡航和车道保持可以分别激活。不过,车道保持需要在自适应巡航开启的情况下才能激活。 功能的开启,不是像有些人所说,车上有个「自动驾驶」按钮,一旦开启,它就进入自动驾驶状态。时速显示区左边的仪表盘图标代表自适应巡航,右边的图标代表车道保持。人机交互非常简单直观。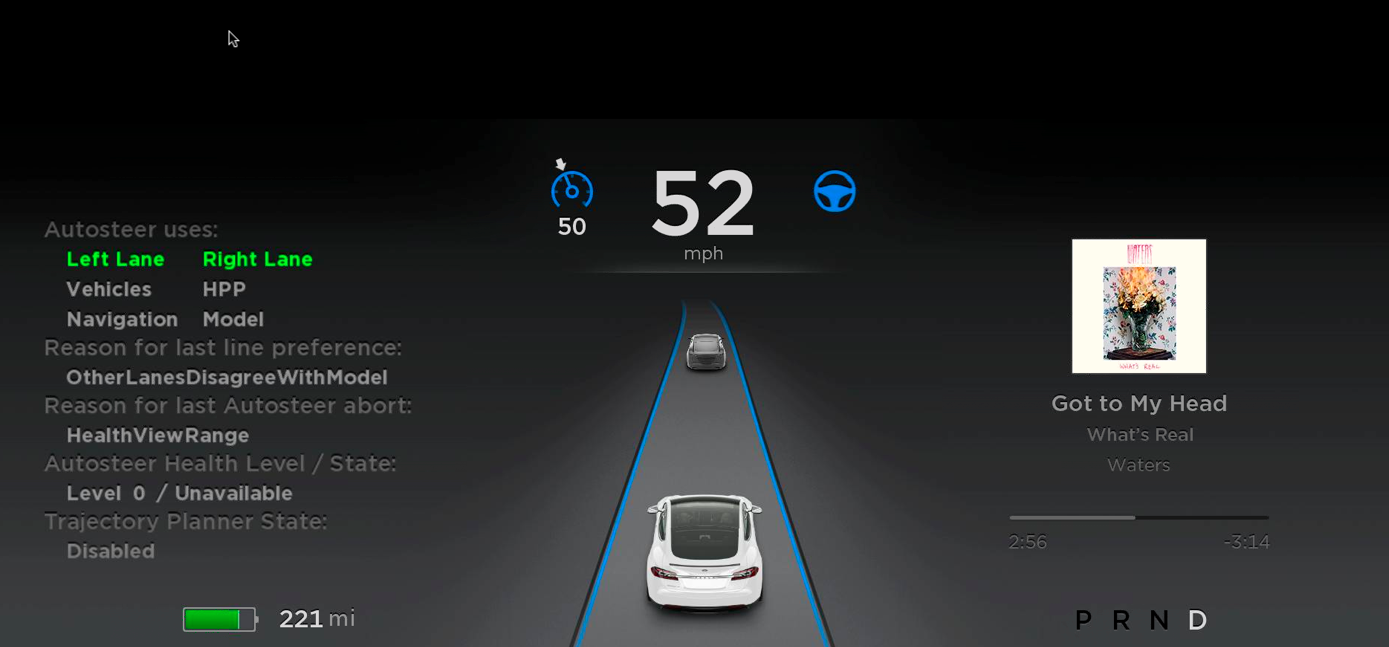
开始说功能。先是自适应巡航。多唠叨一句科普的东西:自适应巡航就是在普通定速巡航基础上加入跟车功能,让车子始终与前车保持固定的距离。在 Model S 上,这个功能被称为「主动巡航控制」, 它进步的地方在于,一旦激活系统,在全速段都可以进行工作(速度上限没太大意义,关键是下限)。
行驶过程中,只要处于跟车状态,在任何时速都可以开启功能(前面没车时,时速超过 30km/h 也可以开启功能),前方车辆刹停,特斯拉也自动刹停,直到前车重新前进,特斯拉也自动跟随前进。巡航不会因为停车时间过长而取消。不像有的车,停车超过几秒就自动解除自适应巡航,需要你重新激活,也不像一些车,再启动时仍需要达到一定的速度才可以激活自适应巡航。
而自适应巡航的时候,如果踩了刹车,会自动退出巡航模式。
另外,它有类似 Auto Hold 的功能,也就是说,停车等红灯的时候,你不用一直踩着刹车。

然后是车道保持。开启这个功能之后,车子会始终保持在车道中间行驶,在有弯道的地方,也可以自动转向。这个功能,直道的时候没什么可说的,只要车道线清晰,能被摄像头识别出来就可以了,关键是弯道。弯道自动转向的体验是否好,取决于你的行驶速度,已经弯的角度,当然,前提还是车道线。 即使车道线清晰,车速过快弯路过急的话,建议你还是手动转向。 体验时我们遇到一个情况:在路口,车道线消失,车辆突然向对向车道自动转向,非常吓人。所以开启这个功能之后,并不是高枕无忧,而是需要你更加小心。适合高速公路使用。
在车道保持这方面,ADAS 里又分几个档次,比如低端的车道偏离提醒,高级一点的车道偏离辅助,更高级的就是主动保持车道。低端的只是提醒你,不参与操作,到最高端的,就是这种能自动帮你「走弯路」的。
自动变道:这是目前量产车里仅能在特斯拉身上见到的功能。它的逻辑是,你打转向灯,车子接收到你想变道的信号之后,判断出符合并道条件,自动向旁边车道并线。但是这个功能其实还是取决于你的, 你要在变道前,确认是否是足够安全才可以打转向灯(比如突然蹿出了车,事故责任在你)。变道时,你只需要进行打转向灯的操作,其他工作车子完全自动完成。不过,如果没有足够大的空间,车子不会变道。像路上那种见缝就钻的开车风格,不是 Model S 追求的。
值得一提的是,在之前的特斯拉车型上,也有变道辅助功能:你来控制方向,打转向灯变道的时候,车子会自动提速一下,让你更利落的完成变道动作。不过在 7.0 固件的自动变道功能里,车子在变道的时候并不会自动加速。
特斯拉提醒过,在自动驾驶过程中,手不应该离开方向盘。经过体验证明,这个真的没错,因为确实会遇到一些紧急状况,是车子没办法自己处理的,需要驾驶员接管。
至于自动泊车,和其他品牌最大的区别是,找到车位之后,你只需要按一下「确定泊车」的按钮,其他操作完全由车子自己完成,而不需要你再控制刹车、换挡。
总结:
1. 有人说特斯拉的自动驾驶是新手福音,对此我不完全赞同。你需要对驾驶有足够的经验,才可以放心的把控制权交给汽车,并且,才可以在有紧急情况时随机应变。一切的前提是你得有足够的安全意识。安全、安全、安全,重要的事说三遍!
2. 总体来说特斯拉的这套 Autopilot 系统,在量产车里绝对算先进,但是你说它有多黑科技?并不是。它的功能大部分都是其他品牌车型上已经存在的,比如自适应巡航,主动车道保持(比如我体验过的英菲尼迪 Q50 混动,比如奔驰 S),自动泊车。而特斯拉聪明的地方在于,他把这些功能的用户体验做的更加完善和自然了。学习成本更低,使用成本更低。(成本不是指钱)
3.. 短暂的体验不能完全发现问题。我觉得,自动驾驶相关功能,过多说它如何「好用」是没用的,而是应该通过一段时间的驾驶体验,发现那些容易让它失效的情况,看它在什么情况下是「不好用」的, 这样才能指导别人更好、更安全的去使用这套系统。所以,我们需要更长时间的测试。
这篇文章可能让你有更深入了解了,但是更多使用感受我们还会继续发掘并且分享。
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
同时欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)& 极市 (微信号:geeket)。



3 responses to “特斯拉自动驾驶功能试用:并不「黑科技」,但是赢在「用户体验」”