
(转载自微信公众号:汽车电子设计,作者:朱玉龙,原标题:谷歌自动驾驶车辆的探究)
我很好奇,Google 是怎么做出来这个自动驾驶车辆的。在查了很多的资料以后,大概的脉络有了一个底。无人驾驶的历史其实是比较长的:

Google 的事情是从赞助 DARPA2005 开始的:

两辆 2007 年的获胜车:
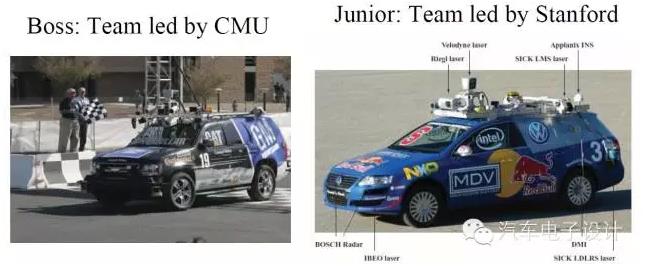
比赛以后,Sebastian Thrun 教授带着核心团队 Michael Montemerlo、Hendrik Dahlkamp、Dmitri Dolgov、Scott Ettinger 、David Stavens 几位去了 Google 开干,这个项目很有趣,是从街景车开始的。后来几位骨干出去单干了,Chris Urmson 和 Bryan Salesky 两位在 Carnegie Mellon(卡耐基梅隆)团队的过去接盘,如下图所示:

总的来说,Google 的车辆,是从 Standford Junior 的车辆开始的:

对比 Boss 整体架构,其实这些车的机理都是类似的:
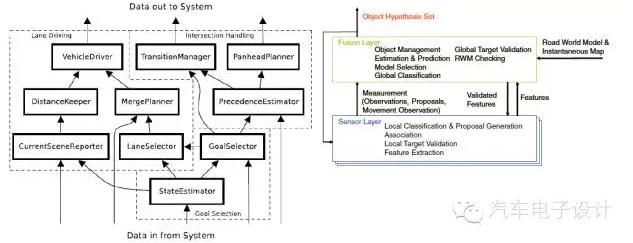
1)Mission Planning 任务规划
任务规划车辆根据已知的路网计算计算可能的路径对应的成本(时间& 风险)
当前位置 A=> 目的地 B 点的最佳路径的任务规划器
2)Behavior Generation 行为生成
顶层行为包括
* Drive-Down-Road
* Handle-Intersection
* Achieve-Zone-Pose
3)Motion Planning
车辆运动和姿态调整
4)Perception & World Modeling
感知和模型
5)Mechatronics
诊断系统
其实 Google 这么些年,根据其日志报告,基本上在对地图、对感知和对地图建模上上了一个新高度。明的是看到的日志,实际上通过不同的机器人公司和街景计划,Google 已经储备了足够的武器库。
- Google engineer Sebastian Thrun, director of the Stanford Artificial Intelligence Laboratory and co-inventor of Google Street View
- Thrun’s team created the robotic vehicle Stanley which won the 2005 DARPA Grand Challenge and its US$2 million prize from the United States DOD (Department of Defense).
- U.S. state of Nevada passed a law on June 29, 2011.
- It went into effect on March 1, 2012, and the Nevada Department of Motor Vehicles issued the first license for a self-driven car in May 2012. The license was issued to a Toyota Prius.
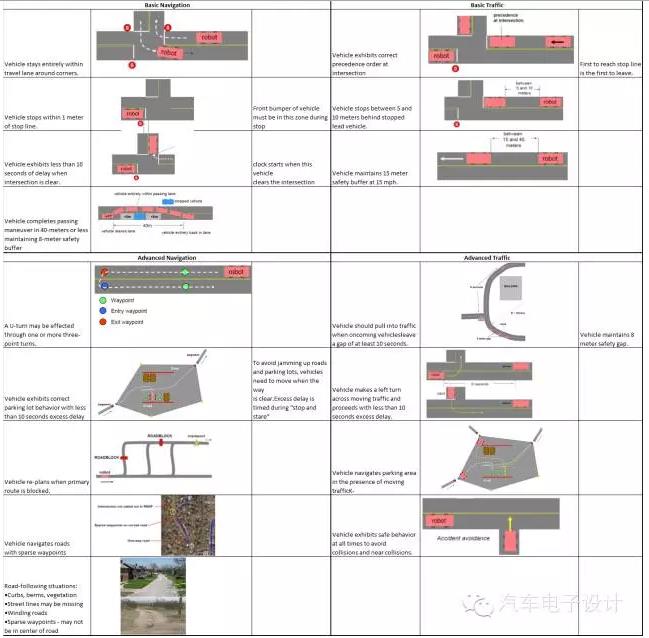
基本的规则,车已经建立了:
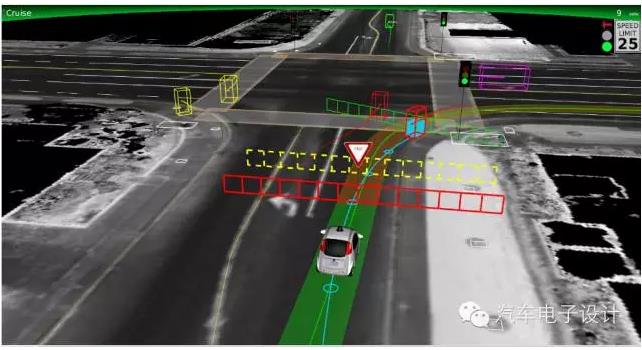
这辆车是这样描绘我们的道路世界的:
这辆车可以自己进行决策,这些策略应该都是在服务器上的,无穷列举各种情况是没办法的。

交叉口上等待救护车开过:

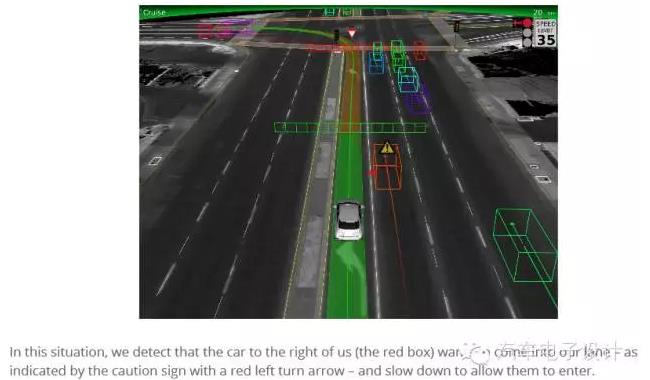
这车是好好先生,可以让人随便插车进来:
小结:
1)这是真的很牛叉。
2)接下来我们需要了解它的结构,它的算法演变,它的进化过程,由于资料有限,我们只能根据其过往的惯性来猜测和探索。
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)& 极市 (微信号:geeket)。

