
在今年的 CES 还没开始之前,「自动驾驶」就被公认为是这次的主旋律之一,实际也确实是这么回事,对于汽车厂商和供应商来说,不拿出和自动驾驶相关的东西,相当于白来 CES 一趟。
所以,围绕自动驾驶他们说了很多,也展示了很多,于是可能你会在很多文章里看见这样的句子:「自动驾驶是这次 CES 的主角,而且也是未来几年的趋势。」
这话没错,但是说了等于没说。GeekCar 更关心的是,通过这次 CES,自动驾驶到底在技术层面展示出了什么样的趋势?或者说,实现完全自动驾驶的「方法论」到底是怎样的?
总体来说有三个方面的变化:
1. 硬件方面,传感器不再「高高在上」。
2. 感知方面,对于「定位」、「地图」的理解更加深入。
3. 决策方面,车辆处理能力、深度学习能力强化。
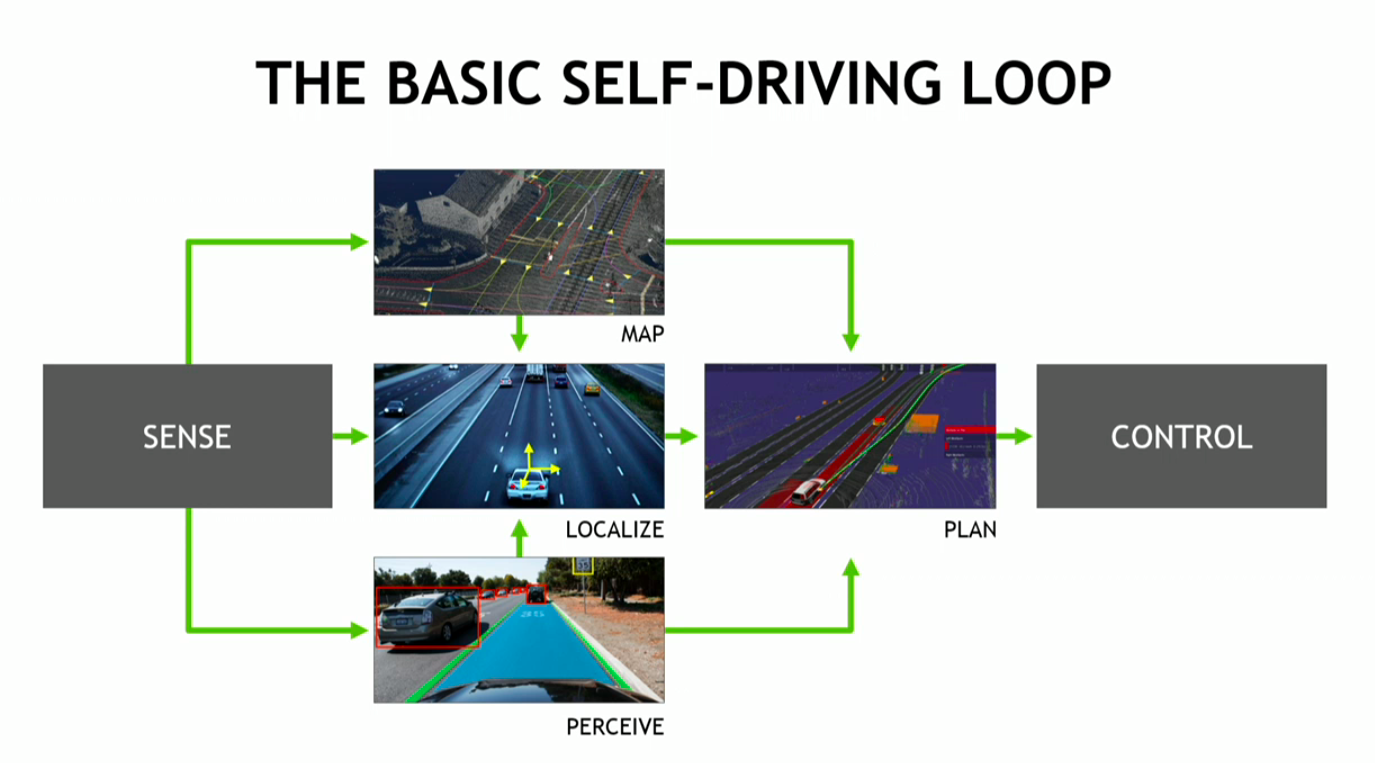
为了让大家对于自动驾驶的基本工作原理有一个直观的了解,在这儿先用一个图示简单说明(图片来自英伟达在 CES 的演讲 keynote)。从图上可以看出,上面提到的几个方面,基本上包括了自动驾驶的关键技术点。
硬件:传感器不再「高高在上」
激光雷达在自动驾驶里起到感知周围环境的作用,很多人觉得,动辄七八万美元的激光雷达会是影响自动驾驶普及的一个重要阻碍,但是在这次 CES 上,Quanengy 发布了世界上第一款用于自动驾驶的固态激光雷达,这个雷达不能 360 度扫描,也不是 64 线而是 8 线,但是换来的却是成本的大幅降低(200 美元左右),而且更加小型化。
所以,原来像花盆一样立在车顶的激光雷达,终于能装在其它位置了,比如车的四角。更低的成本意味着可以在一辆车上装更多的激光雷达。
另外福特也在这次 CES 上宣布,他们会把 Velodyne 最新推出的车用激光雷达装在自己的自动驾驶测试车上。
激光雷达本身就可以做到这么便宜,Quanengy 的产品相当于还原了问题的本质。激光雷达成本越低,也就会被装到更多的车里,对于自动驾驶的发展,肯定是有好处的一件事。
但是也有不依赖雷达的自动驾驶方案,比如供应商麦格纳这次就展示了依赖单目摄像头开发的自动驾驶方案,他们的目的是想让更多廉价车型也能具备这种功能,虽然是比较初级的自动驾驶(更像是自适应巡航),但是至少证明不依赖测距雷达实现自动驾驶是可行的。
所以总体来说,自动驾驶的硬件门槛正在变得越来越低。如果说七八万美元的激光雷达太高高在上,那么这次 CES 展示出来的东西,显然是更多考虑到了商业化的因素。不管是廉价激光雷达还是麦格纳的方案,都是为自动驾驶量产化、商业化做的准备,从这个角度来说比去年更贴合消费电子展的「消费」二字。
对于「定位」、「高精度地图」的理解更加深入
高精度地图、视觉识别,这二者的作用是让车子精确的定位和感知环境,人们在这方面的理解和解决方案变得更成熟。
首先是自动驾驶所需的地图,一方面,它的获取方式正在发生改变,另一方面,它本身也有一些变化。
在我们惯常的理解里,高精度地图来源于图商的测绘,但是现在「众包」的模式开始受到重视。在 CES 之前,就传出丰田要利用这种模式采集高精度地图,所依靠的硬件是用户车内的摄像头+GPS,而在 CES 上,Moblieye 也宣布和通用、大众合作,做高精度地图方面的采集,使用的当然也是 Mobileye 的摄像头。另外,Here 发布的 HD Live 地图,打的也是「众包」的概念:把车辆传感器读取到的数据上传到云端,然后再下发给其他车辆。
这样的好处显而易见:用更低的成本,换取更多的数据。目前高精度地图主要依赖激光雷达采集,成本很高,「众包」肯定有节约成本的目的,而且可以在同样的时间段内获取更多的数据。
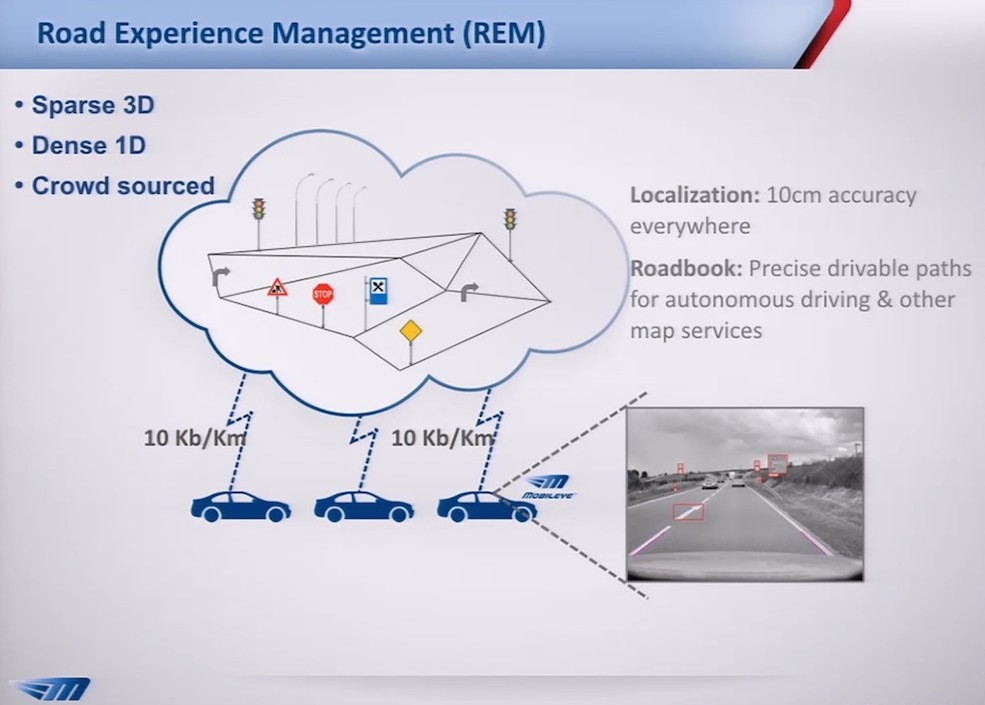
但是除此之外,这种方式也有其他的好处。首先是更「轻量化」。以 Mobileye 做的 REM(Road Experience Management,路网采集管理)方案为例,通过采集包括交通信号、指示牌、路灯等「地标」,得到一个简单的 3D 坐标数据;再通过识别车道线信息,路沿,隔离带等获取丰富的 1D 数据,这些数据叠加形成所谓的「RoadBook」(路书),数据量只有 10kb/km,而谷歌的高精度地图每公里的数据量可能有几个 G 之多。
另外一个好处是更加实时化。比如 HD Live 地图就可以做到云端的实时更新,并且实时下发最新数据。突发的路况信息、道路的最新变更情况,都可以通过这种方式得以解决。
可以看到的是,原来可能我们认为高精度地图更多的是依赖于雷达,而和视觉识别(摄像头)关联度相对要小,但从某种意义上来说,它们其实是一个整体,两者互相配合、共同作用,才能让车辆具有更精确的定位和感知能力。
处理能力的强化
这部分最明显的感受是本机处理能力、深度学习能力的提升。
英伟达在 CES 上发布性能相当于 150 台 MacBook Pro 的 Drive PX 2,是最有标志性的事情。Drive PX 2 用了 12 颗 CPU,250 瓦的总功率基本也只有汽车这个级别的硬件才能承受,并且用到了水冷散热。它可以处理包括摄像头、雷达、激光雷达在内的 12 路信号,深度学习能力达到每秒 24 万亿次。
它兼顾了本机处理和深度学习的要求。一方面,它足够满足车辆本身的视觉处理需求,另一方面, Drive PX 2 采集到的数据经过处理之后会上传云端,进行深度学习网络的训练,训练的成果可以用来提升所有车辆的智能程度。
其实这个「深度学习」,和上面段落提到的「众包」是相辅相成的。特斯拉 Autopilot 的自主学习功能也是这方面的实际体现。
不管是本机处理还是深度学习,背后都意味着海量数据的获取。就像英伟达所说,The more data we collect, the smarter our system becomes. 而为了更加 smarter,就必须提升处理能力。
可以很明显的发觉到,今年大家开始越来越意识到「人工智能」、「深度学习」的重要性,并且把它上升到前所未有的高度。丰田砸下 10 亿美元研究人工智能也是特别好的例子,Mobileye 也提到了深度学习对他们的重要性。
当然,在这个过程里,数据的采集压缩能力,数据管理的能力,也是特别重要的。
总结
从这次 CES 上各大厂商的表态来看,还是认为 5-10 年内可以实现完全自动驾驶,不能说他们的信心完全来源于以上提到的这几点变化,但不能否认的是,它们确实是推动完全自动驾驶发展的关键因素。
可能你会觉得,通过这次 CES,自己对于自动驾驶的认识比之前提升了很多,那么恭喜你,已经慢慢看出门道了。从宏观的层面来说,这也意味着大家做自动驾驶的方法论越来越清晰。
长远的看,实现完全自动驾驶是必然结果,但是在「结果」之外,选择什么样的解决方式,为什么这么选,这些都是挺值得研究的问题。
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
同时欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)& 极市 (微信号:geeket)。


