
一个月前,谷歌的 RX450h 无人驾驶汽车刮蹭了一辆大巴,并负主要责任。事故发生时,谷歌的 RX450h 时速只有 3.2 公里/小时。
回顾一下案发现场:当时谷歌 RX450h 在右转车道,想要右转弯。但是它探测到路边有两个沙袋,所以车又向左打方向,想要回到车道中间。然而这个时候,左侧的直行车道有一辆大巴并未让行,于是 RX450h 的左侧翼子板和大巴右后方发生刮蹭。大巴受轻伤,RX450h 损失前保险杠、左侧翼子板和一个传感器。
但巧的是,谷歌就在最近几天拿到了「无人驾驶汽车的公交车识别技术」专利。

识别公交的正确姿势
从专利文件来看,谷歌方面在 2014 年 3 月 13 日就申请了该项专利,2016 年 3 月 8 日获得通过。根据专利内容来看,这项技术只教会了机器如何识别「校车」,而不是上个月事故中的「公共交通大巴」。但实际上,两者识别原理应该是相同的,只是校车特征更明显。
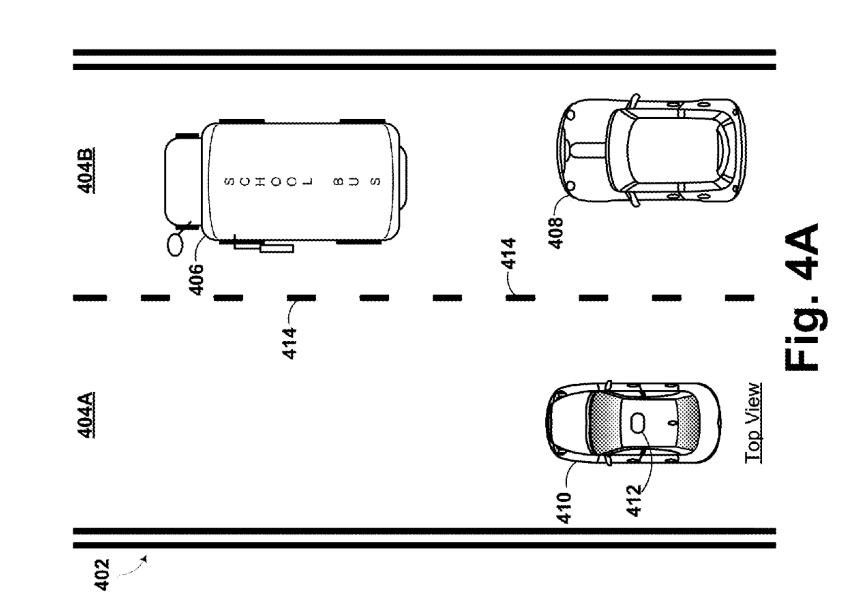
汽车在配备了摄像头、激光雷达等传感器后,就有了一定的「感知能力」。在整套无人驾驶系统中,会存有一些已知车辆的数据。谷歌的汽车在行进过程中,会自动比对周围车辆的「相对大小」。如果发现某辆车比其他车辆都大,就再把这辆车与数据库中的车型进行比对。在整个识别过程中,汽车会考虑到的因素有车身颜色、STOP 标志、SCHOOL BUS 标志等等。

这让我想到了前段时间的波士顿动力公司的机器人,仔细观看视频,你会发现机器人要找的箱子上、门上,都有相应的标记。如果在这些大车上也做上相应的标记,那么对于无人驾驶汽车来说,应该能大大简化识别流程。在 V2V 技术普及之前,这应该也是个比较折衷的办法。

事故和专利之外的思考
来分析一下谷歌在上个月发生的「车祸」,由于此次谷歌承担事故责任,所以很有代表性。
按照谷歌的说法,当时他们的 RX450h 已经探测到了后方驶来的公交车,电脑经过判断,公交车会让行。而谷歌车上的工程师,通过后视镜也看到了公交车,同样认为公交车会减速或让行,所以并没有人工介入。然而实际上,他终于还是没搞懂那个公交车司机……
其实这也说明,谷歌研究对「特定车型」的识别非常有必要,因为不同车型司机的驾驶习惯不同。在汽车侦测到公交车、卡车此类车型时,可以进入「小心翼翼」模式,降低事故发生概率。一方面,是因为这类车司机开车相对鲁莽;另一方面,是因为大车盲区大,车重,刹车距离较长。对于依赖于距离判断的无人驾驶汽车来说,这一点非常重要。
在发生事故后,谷歌方面的工程师已经重新调校程序,让谷歌无人车在面对此类情况时小心驾驶。
让我们再把视线转回事故现场,看过车祸现场,你就会觉得就算是业界领先的谷歌无人车,也会犯下如此「白痴」的错误。

在事故里,谷歌无人车之所以停车,是因为遇到了「障碍物」,而这个障碍物据外媒所说是「沙袋」。此时我脑补的是:谷歌 RX450h 前方路面码了一米多高的沙袋,它走投无路,只能向左并道。实际上却是上图中下水道边上的两个小沙袋。是不是感觉有点坑爹?
谷歌方面的人表示:「这次事故我们确实有责任,如果车没动的话,就不会有事故了。」但反过来想想,如果它继续直行,应该也不会有事故。对于 RX450h 来说,这样的小障碍,分分钟碾压。然而它还是「怕」了,选择避开障碍物。
这就说明了两个问题,首先是目前谷歌的算法还相对「保守」,无法根据自身车辆的通过能力来进行判断是否前进;其次,对「异形障碍物」的识别能力有待提升,它不知道前面是沙袋还是带钉子的木板,这一点也很重要。
这一次是小沙袋引起的刮蹭,好在两车都是低速,双方乘客都相安无事。想象一下如果在无人驾驶汽车在高速行驶状态下,突然飞来一个塑料袋,这时它来个紧急刹车或者变道,情况就不怎么妙了。即使是人类,也有看走眼的时候…
对于谷歌来说,这次事故算是「千载难逢」,因为并不是每次路试都能遇上车祸,而每次车祸都是改进算法的好机会。在汽车智能化的路上,车辆的机械性能已经是次要地位,随之而来的问题则是如何教会机器「像人一样看懂这个世界」,比如「异形障碍物识别」。
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车(微信号:GeekCar)&极市(微信号:geeket)。


