
不过,这个周末注定是戏剧性的。在百度高德开撕的前一天,也就是上周五,另一家图商四维图新参加了一个名为「Open Auto Drive Forum」的自动驾驶技术讨论会,简单说,这个论坛要做的就是把圈子里的人聚集起来,讨论出一个未来自动驾驶技术的标准。四维图新在这上面也聊了聊高精度地图的事儿——这和高德这两天在说的东西不谋而合。
(这是一个国际化的会议,学术范十足,在会议现场一半以上都是外国专家,当然还有百度、高德的同学。)

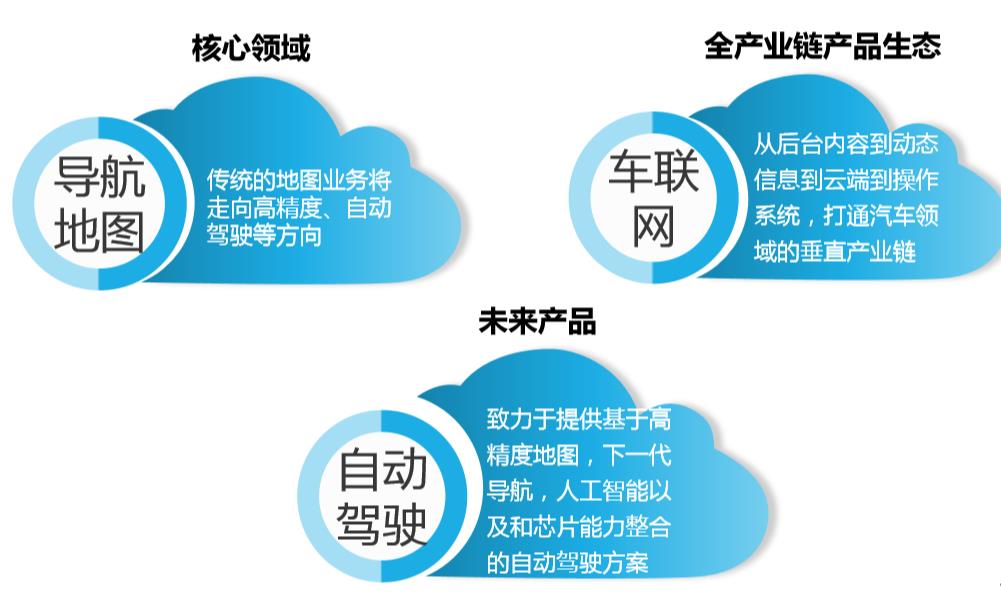
在自动驾驶方面,地图供应商的切入点就是高精度地图。除了四维图新之外,百度、高德和腾讯,都在做高精地图这件事。四维图新在这方面算是起步比较早的一家公司,目前他们已经成立了「自动驾驶实验室」和「深度学习实验室」。

四维图新 CTO 戴东海说,在 2012 年就有国外厂商找到四维图新,双方当时在高精度数据、自动驾驶等方面做了一些早期的合作。在接下来几年中,会有很大的量产计划。
在今年 6 月,四维图新已推出支持 Level 2 全国高速公路网覆盖的数据和产品,达到量产的能力。 关于未来,四维图新方面也给出了一些具体的时间节点:
2017 年中,推出 Level 3 国内全高速公路网覆盖的产品,并达到可以量产的程度。
2019 年初,提供主要城市的 Level 4 级别的地图数据。
四维图新的高精地图怎么做?
目前做高精度地图分为几个「流派」,在此以谷歌和 Mobileye 为例。
谷歌使用激光雷达采集高精度地图数据,数据量很大,每公里是 GB 级别的。如此大的数据量,普通车厂很难将其量产;Mobileye 的 Road Experience Management 概念,可以以众包的方式通过用户收集高精度地图数据,但这些数据只能用于 Mobileye 的传感器。
四维图新正在做的高精度地图,则是和传感器无关的,车厂可以有很大的灵活度。不管车厂使用哪种自动驾驶解决方案,四维图新的高精度地图都能够继续沿用。
至于高精度地图的数据量大小,戴东海则表示,按照经验来说的话,大概其和传统的数据是 1:1。
另一方面,高精度地图的数据必须是实时更新的,四维图新的做法是把地图分为了几个「层」,包括基础导航层、高精度路网层、实时动态层以及其他的环境影响因素。这些「实时性」要求比较高的数据,将会通过云端不断更新。
除了在「软件」方面的努力之外,今年 5 月四维图新收购了杰发科技(MTK 子公司)。戴东海说,这次合作是「很深层次的战略层面」。很明显,四维图新是想通过打造智能芯片,把软硬件打包,实现全产业链的竞争。

横向对比来看,四维图新更像是一个传统的汽车供应商,和车厂紧密合作,满足车厂需求。
不过它的友商高德似乎走了一条更加「互联网」的道路,因为前两天高德居然宣布高精地图免费了。作为一种面向 B 端的产品,高德是在用一种面向 C 端的套路在做宣传。在高德的设想中,作为交换,车厂要开放一定的道路数据给高德,以此逐渐完善高精地图。不过,所谓「免费的就是最贵的」,车厂愿意开放数据吗?这个需要时间给出答案。
面对来自互联网公司的竞争,当我问到四维图新的优势是什么的时候,戴东海的回答很简单:
「我们相对起步早一些,积累的更完善一些,产品的成熟度更高一些。评估完一圈之后,想落地的车厂都是来找四维图新。」
好吧,反正你们谁也不服谁。所以这「地图炮」肯定还得接着开……
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)& 极市 (微信号:geeket)。



3 responses to “地图炮 | 高德百度忙着争第一,友商四维图新在干什么?”