不过对于这群车主来说,作为他们很多人的代步工具,特斯拉本身的一些科技属性对日常驾驶还是有不少影响。
比如之前一段时间,特斯拉 Autopilot 功能就被曝光了好几次事故,甚至还有司机死亡。而作为围观群众的我们,可能只会发出「真吓人、还是安全第一」这样的感叹,然后继续开着自己那辆没有类似功能的车子。
但是,特斯拉车主花大几万买来了 Autopilot 功能,因为这些意外就不能「装 X」了?这显然更不合适。所以说,我们需要知道在日常生活中,如何用正确的姿势使用特斯拉 Autopilot 功能。
在昨天,360 汽车信息安全实验室举办了一个叫做 V-Hacker(Vehicle Hacker)的自动驾驶安全训练营,找来了几十名特斯拉车主。360 汽车信息安全实验室负责人刘健皓为他们演示了如何欺骗特斯拉的车身传感器,破坏自动泊车功能的实现。

关于特斯拉的各种破解,GeekCar 已经报道过很多。比如关于昨天演示的破解特斯拉「远程召唤」功能,其实原理就很简单,成本也不高。
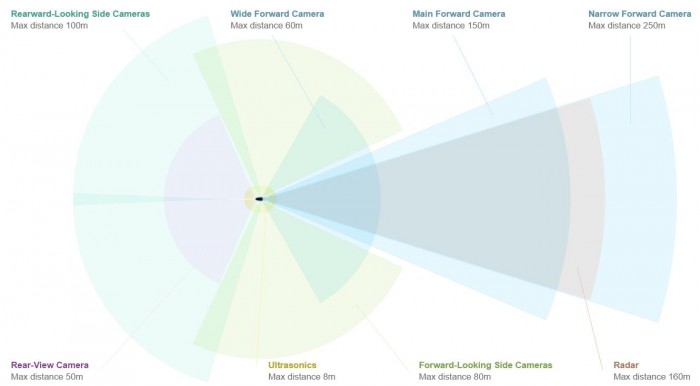
当特斯拉使用自动召唤功能时,车身四周的超声波雷达就会探测 5 米以内的障碍物。一旦检测到障碍物,就会自动刹车。不过在实际演示中,刘健皓只是通过干扰器发射信号,就使特斯拉在自动召唤过程中紧急停车了。
能实现「破解」的原因也很简单,主要是因为现阶段 Autopilot 的模型和算法还存在缺陷。首先是传感器探测频率没有弹性机制,容易被逆向破解;其次,决策算法没有容错机制,当传感器进行数据融合时,对于异常数据的分析还存在漏洞。因此,通过发射干扰信号,传感器就会收到错误的探测信息。
事实上,整个破解工具只需要成本为几毛钱的信号发射器,然后写入能干扰特斯拉传感器探测频率的代码,之后配合移动电源就可以实现干扰信号的发射。

当然,如果你是车主,看到这里也不用太担心。事实上,这样的破解方式虽然实施难度不大,但是实际驾驶中出现的概率并不高。其次,无论是特斯拉升级到 8.0 系统之后,还是之后发布的 Autopilot 2.0 版本硬件,都在持续对于这部分功能进行安全性、可靠性的升级。所以说,过分的恐慌忧虑也是没必要的。
事实上,现场的车主也表现出了超出我预期的冷静。很多人表示会经常使用 Autopilot 功能,也发生过一些剐蹭。虽然看着自己的车被轻松破解,但总体态度还是非常积极,依然表示对 Autopilot 功能充满信心。毕竟是舍得花百万给自己贴科技标签的人啊…
在最后,对于每天都有机会使用 Autopilot 功能的车主来说,这里还有 10 条专家的建议可以作为参考:
1. 启用自动驾驶做辅助驾驶时,事先一定要注意在路面上的情况。
2. 在强光、逆光行驶下要注意控制方向盘和车速。
3. 辅助驾驶自动转弯时,转角大于 45°角时需要控制方向盘。
4. 高速行驶进行车道保持功能要控制与前车车距,脚要放在刹车上。
5. 跟车转弯时双手放在方向盘上,防止周边有汽车突然窜出。
6. 进出高速公路主辅路时,需要控制方向盘,辅助驾驶可能无法判断障碍物。
7. 在高速路行驶时,必须进入正式车道再启动自动驾驶功能。
8. 在高速路上启动自动驾驶模式后,在变道时,要注意前后方车辆车距。
9. 在目前技术状况下,最好在道路条件良好的情况下启用自动驾驶系统,确保驾驶安全。
10. 选择合适的前方车辆跟随,然后锁定开启自动驾驶功能,不要跟随公交车,大卡车等特殊车辆。
最后的最后,还是再提醒一遍,在目前的路况下,千万不要过分相信机器…
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)&极市 (微信号:geeket)。


