
在今年年初,博世成立了自己的「全球人工智能研究中心」,这个中心包括德国斯图加特,印度班加罗尔以及美国帕罗奥图三个研发据点。上周 BCW 大会上,博世的 CEO Dr. Volkmar Denner 发布了与 NVIDIA 的合作消息,并将 AI 列为了博世未来发展的四个重要方向之一。想看 GeekCar 专访 NVIDIA CEO 老黄的文章, 请戳这里 。

在大会期间,GeekCar 采访了这个「全球人工智能研究中心」的负责人 Dr. Hauke Schmidt,同时在场的还有博世的企业公关总监 Dirk Haushalter。Dr. Schmidt 之前是博世数据挖掘部门的负责人,而这个部门很有可能就是 AI 研究中心的前身。

以下为采访的实录(G 代表 GeekCar,H 代表 Dr . Hauke Schmidt,D 代表 Dirk Haushalter):
G:首先请您先介绍一下您所带领的这个部门吧,这个部门主要都是做哪些与 AI 相关的事情?
H:我们把这个部门称之为人工智能中心,因为它包含着全球多个研究据点。我们主要关注的是人工智能当中的深度学习(Deep Learning)以及机器学习(Machine Learning)领域,换句话说就是数据驱动的领域。目前,我们还没有涉足语义以及符号分析等领域,但是未来或许也会有所涉及。
G:在您看来,AI 和自动驾驶的联系是怎样的?
H:自动驾驶当中的很多方面都需要 AI,比如说感知、路径规划、执行以及车辆控制等。这是一套非常复杂的系统,而 AI 可以将这些部分链接在一起。例如目前的传感器和控制系统是相对分离的,我们需要 AI 将他们整合到一套系统中。
G:如果我们把自动驾驶分为感知、地图、决策、控制四个环节的话,AI 是不是主要将负责决策的部分?
H:其实在感知部分,AI 的作用也十分重要。因为感知不简简单单是传感器收集画面,机器还需要分辨出行人, 自行车,机动车等等。这些都需要通过数据分析和 AI 的应用去做具体的识别划分。

G:那么在驾驶决策部分呢?机器如何学习人类一样的驾驶行为?
H:如果从数据驱动的深度学习角度去看,那么模拟人类的驾驶行为主要是依靠案例及数据。这需要将车辆放在各种不同路况和场景中测试,并看机器在这些场景当中做出的决策是否够好。在测试过程中需要有人工的驾驶员在驾驶位置随时待命,以防止问题的发生。一旦机器产生了错误的决策,那么这些错误将被作为反面教材去重新优化算法,这样的话下次机器再遇到类似的场景的时候,就会做出更好的决策。
G:提起人工智能,人们总是会想起在围棋比赛中击败人类职业棋手的 Alpha GO。那么 AI 在围棋上的应用和在驾驶上的应用有什么不同?因为驾驶环境当中包含更多的决策者,且环境很难预测。
H:这两者间有多个区别。首先,驾驶的环境是不可预知的。第二,可选择的行动数量也不同,在下棋当中,每一步的可选择范围一般只有三四种,最多也就是六七种,且这些行动非常的具体化(在不同的位置落子)。但是在驾驶环境中,这个选择范围就大得多了,单说转向的时候,就有多种不同的转向程度,因此在驾驶场景中,机器将会有更多的选择空间。第三,两者在量化程度及可计算程度上也不同。下棋时,机器可以提前计算出不同步骤下所可能产生的结果,对对手的预判也会更加准确。而在驾驶环境中则不同,路面上会有多个认为决策者(行人,人工驾驶的机动车等),他们有他们自己的行为策略,机器无法保证一直对他们的行为做出准确预判。所以驾驶要比下棋有着更多的不可预知性。
 G:那么你们将通过什么方式来攻克这种不确定性?
G:那么你们将通过什么方式来攻克这种不确定性?
H:就像我之前说的,还是要通过足够多的案例及测试数据积累。只有积累足够多的测试里程,并应对了足够多的驾驶场景,机器的算法才能够不断的优化。
G:所以我可否能理解为目前自动驾驶的瓶颈就在数据的积累上?
H:是这样的。目前自动驾驶发展的关键就是要积累足够多的有效数据,并不是所有数据都可以,有效的数据需要有清晰的标注,你需要告诉机器,这个数据中的行为是正确的还是错误的。积累这种有效数据需要极大的成本,而这正是自动驾驶发展的瓶颈所在。
D:同时是不是还需要把系统和算法做的更加智能化?
H:我认为让系统和算法更智能化是个挑战,但还不会是瓶颈。目前我们已经集结了很多专家来让系统更加智能化,这个目标是可以解决的。但是再好的系统也需要有足够的数据去驱动和优化,这就像驱动发动机的燃料一样。
G:现在行业内有机器学习(Machine Learning)、深度学习(Deep Learning)、CES 期间 Mobileye 又提到了增强学习(Reinforcement Learning)。这几种方式有什么不同?
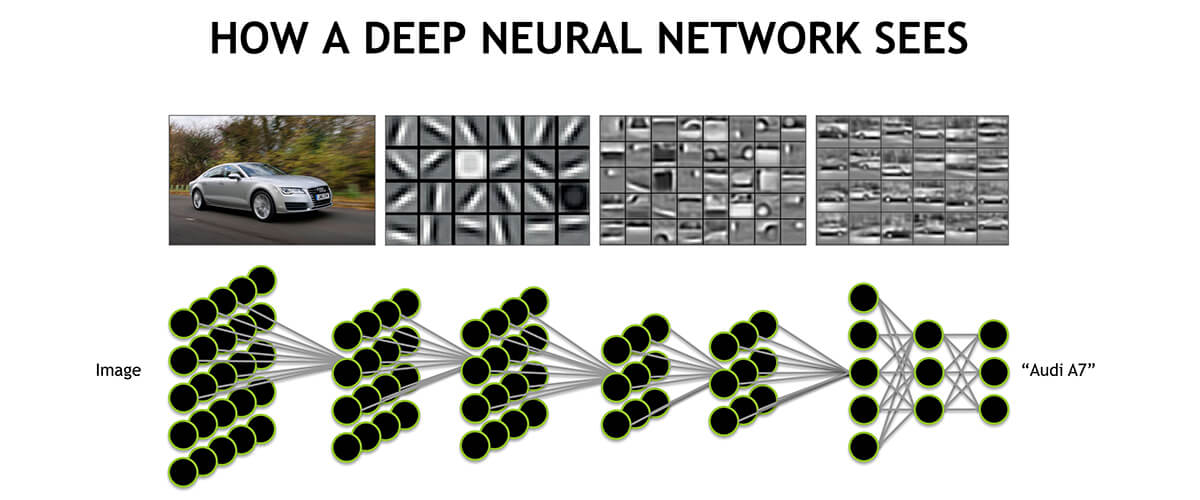
H:深度学习(Deep Learning)的特点在于神经网络的结构,深度学习在神经网络上有着众多的隐层(Hidden Layers),一般 5 层以上。在神经网络中会有输入层,这个上面的神经元会链接车辆上面的各个传感器,例如一个 1000×1500 像素的摄像头,每个像素是输入层上的一个神经元。然后网络中还会有输出层,它来负责车辆的控制,例如转向,刹车等。而隐层的作用就是链接输入和输出层,隐层的具体决策和工作逻辑目前还不清晰,这也是我们研究的一个重要方向:去解释隐层的决策逻辑。以上就是深度学习的基本原理。
而增强学习(Reinforcement Learning)的重点是如何去训练神经网络中的神经元。增强学习的应用关系到了应用环境,例如车辆在驾驶环境中做出了一个行为,这个行为会对驾驶环境产生影响,此时车辆上将会自行判定这个行为到底是好的还是坏的,比如这个行为是撞上了别的车还是保持了正常的行驶线路。在这个判定之后,系统的算法会收到一个正面或者是负面得反馈,而这个反馈会进一步增强系统得算法。
G:我是否可以理解为增强学习可以让车辆本身自行优化自己的算法和决策?
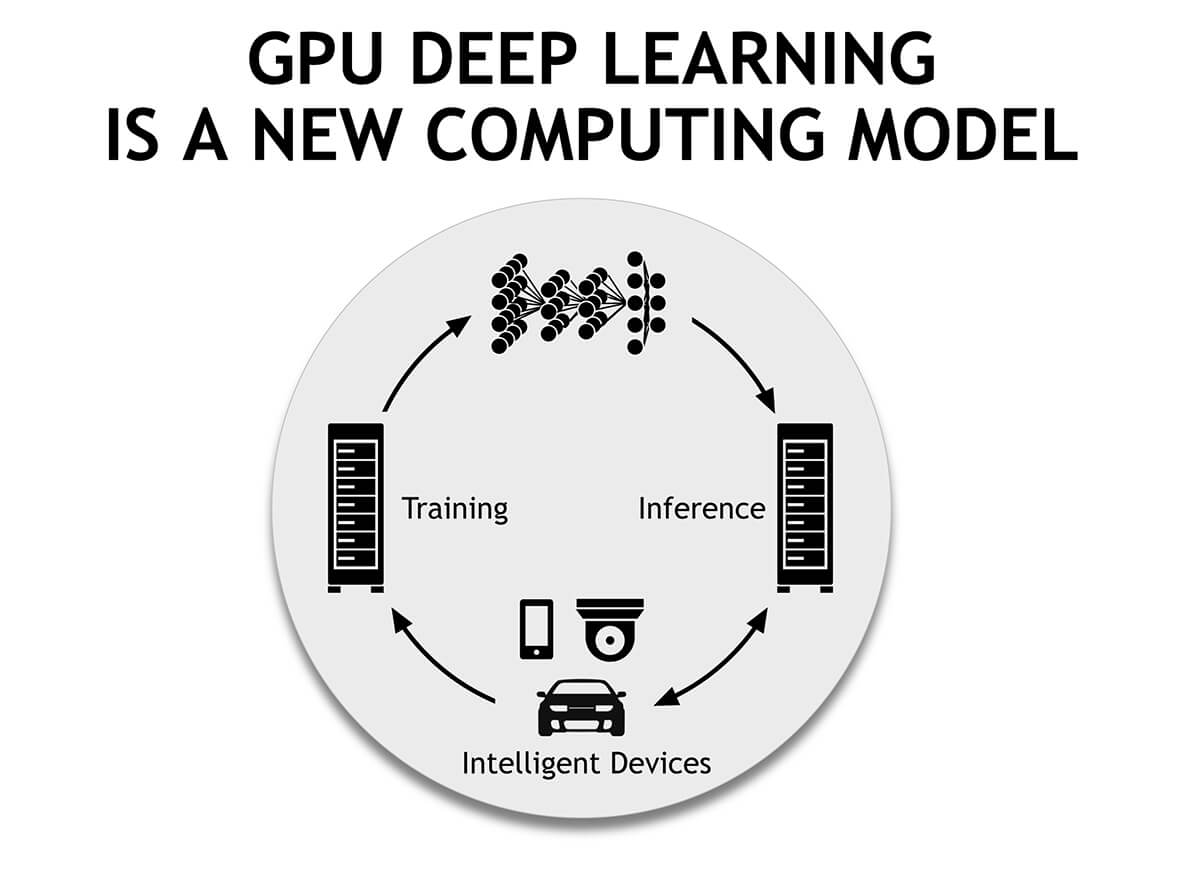
H:这并不是我们的做法。我们的做法是在车辆上面植入一个固定的神经网络模型(Model),它不会自己做出改变。但是车辆在行驶过程中将会不断收集数据,并把这些数据上传到云端。在云端上,这个神经网络模型会得到训练和优化。在这之后,我们会将优化后的模型再去做测试,其中将包括我们挑选的一些特定的路况与驾驶场景。当我们确定了优化后的新模型能够应对这些场景,并能够确保其实际应用的安全性之后,我们才会将新的模型部署到车辆上。此时,适配新模型的车辆将会有更好的表现。因此,我们的算法学习和优化并不是直接在车辆上面完成的,而是会经过一个系统性的流程来实现。
G:在驾驶场景当中将有多个 AI ,包括语义识别、人脸识别、车辆控制等。如何将这些 AI 整合在一起?
H:其实并不需要把它们都整合在一起,因为我们并不是把一个人工智能直接卖给用户。用户关注的是最终产品的表现,他们希望车辆能识别他们的声音,识别他们的身份,希望车辆能够自己驾驶。而在后台一共有几个 AI 在工作,对于用户来说是不重要的。你刚才提到的这三个 AI 会有一些联系,比如当你开车到某个路段时,希望能够进入自动驾驶模式,然后通过语音向系统发出指令。但这其实只是两个 AI 系统之间的一个简单链接。
G:既然您是负责人工智能相关的业务,那可否透露一下与 NVIDIA 的合作,双方具体是怎样的分工?
H:NVIDIA 将负责硬件部分,而博世将围绕这个硬件构造全套的自动驾驶系统。
D:NVIDIA 将提供硬件芯片,主要是 GPU。
H:是的,我们使用 NVIDIA 的 GPU 芯片驱动博世的算法,这样整套系统才能运转。
G:也就是说 NVIDIA 提供硬件,以及基础的一些驱动程序,而博世则提供算法?
H:我是这么理解的。
G:那么未来的发展中,硬件将如何帮助您的团队优化算法?您认为硬件和算法哪个将更加重要?
H:我认为最重要的其实是成本控制,有了 NVIDIA 的 GPU,我们现在可以将硬件做得更加小巧和紧凑,同时我们也能够帮助降低这套硬件的成本。与 NVIDIA 合作的这套小型系统的性能与几年前我们在卡车上应用的大型计算单元相当,这才是重点所在。
D:在 Schmidt 的回答基础上我还要补充一点:理论上,我们也可以和其它的芯片解决方案供应商合作。
G:说起合作,Intel 刚刚收购了 Mobileye,而 Mobileye 的 Shashua 之前一直提倡行业的联合以及数据的共享。对这点,您怎么看?(GeekCar 关于 Intel 收购 Mobileye 的报道文章)
H:对于 Intel 对 Mobileye 的收购,我无法发表评论。从博世的角度来说,我们与客户,与供应商都有很深的合作。尤其是在数据收集层面,我们一直在尝试通过合作和协商来尽可能的收集更多数据,因为如我刚才所说,这个是瓶颈所在。
G:你们也在和自己的合作伙伴分享你们自己的数据吗?
H:这要取决于具体哪个合作伙伴,以及具体的协商细节。例如对方向我们分享了他们的数据,则我们也会相应分享我们自己的数据。每个具体的合作都有所不同。
D:我同意,这取决于合作伙伴以及数据本身。博世自身是非常开放的。对于 Intel 收购 Mobileye,从博世集团的角度来说,我们认为这是十分正常的,且我们很欢迎这样的整合。不过,他们之间的整合与我们和 Nvidia 的合作有一点不同:我们拥有百年的汽车行业经验,这会给我们带来优势。Intel 和 Mobileye 更像是芯片技术与摄像头识别技术的整合,他们还不具备我们这样的汽车行业经验。这点上,我们还是很自信的。
G:那么与硅谷的科技公司,如 Google 和 Uber 比,博世的人工智能有哪些优势呢?
H:我觉得主要有两点,首先我们公司有着足够的汽车行业经验,这包括传感器,软件以及服务等领域的专业知识。这些是硅谷的科技公司没有的。第二是我们的人工智能技术在博世涉足的其它行业也会有广泛应用,除了汽车和出行之外,我们在建筑、能源、工业制造等领域也都有人工智能的应用。从「物联网」的趋势来看,博世很擅长「物」的部分,我们是制造和工业领域的专家。而现在我们将在此基础之上进一步添加更多的软件服务与技术。

此次专访之后,博世的公关负责人也告诉了我他们眼中的高级别自动驾驶落地时间:L4 级别为 2025 年。这个时间确实要比之前老黄预测的 2019 晚了很多。汽车制造行业对外发声时还是维持了一贯的保守风格。
但是,博世对 AI 的发力其实代表着一个重要的信号:汽车制造业的巨头们(不管是主机厂还是供应商)正在加快自己向软件服务公司变化的脚步。把这个信号与 Intel 收购 Mobileye 结合在一起,你就会发现,双方正在以惊人的速度走向整合。这在之前制造业与科技业互相不待见的时代是很难想象的。
如果博世最终真的能够发展出强大的人工智能以及物联网技术,并用这些技术将自己涉足的各个工业及服务领域联系在一起(这其中包括汽车,智能制造,建筑,家电,售后维修等等)。那我们没准就真能看到生态世界了。
贾总,要加油啊!
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)&极市 (微信号:geeket)。

One response to “先忘记吴恩达,我们和博世 AI 部门老大聊了聊汽车供应商怎么做人工智能”