(编译自 The Verge)
马路并不是一条条固定不变的混凝土和沥青路面,它们不断地发生着改变。交通信号灯可能增加或减少,十字路口可能变成环状交叉路口,一条安静的街道可能变成建筑工地。这些变化无时无刻不在我们的身边发生着。
人类司机能够适应这些环境的变化,但是,自动驾驶汽车需要额外的帮助——地图。不过,Lvl5 的三位创始人认为,仅仅只靠老式地图是没用的。

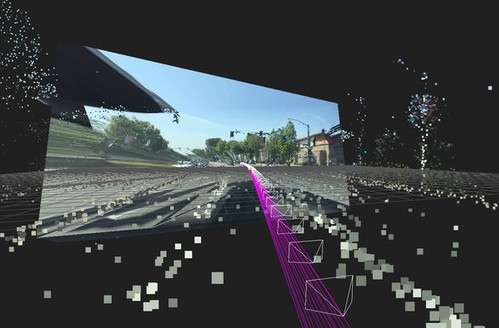
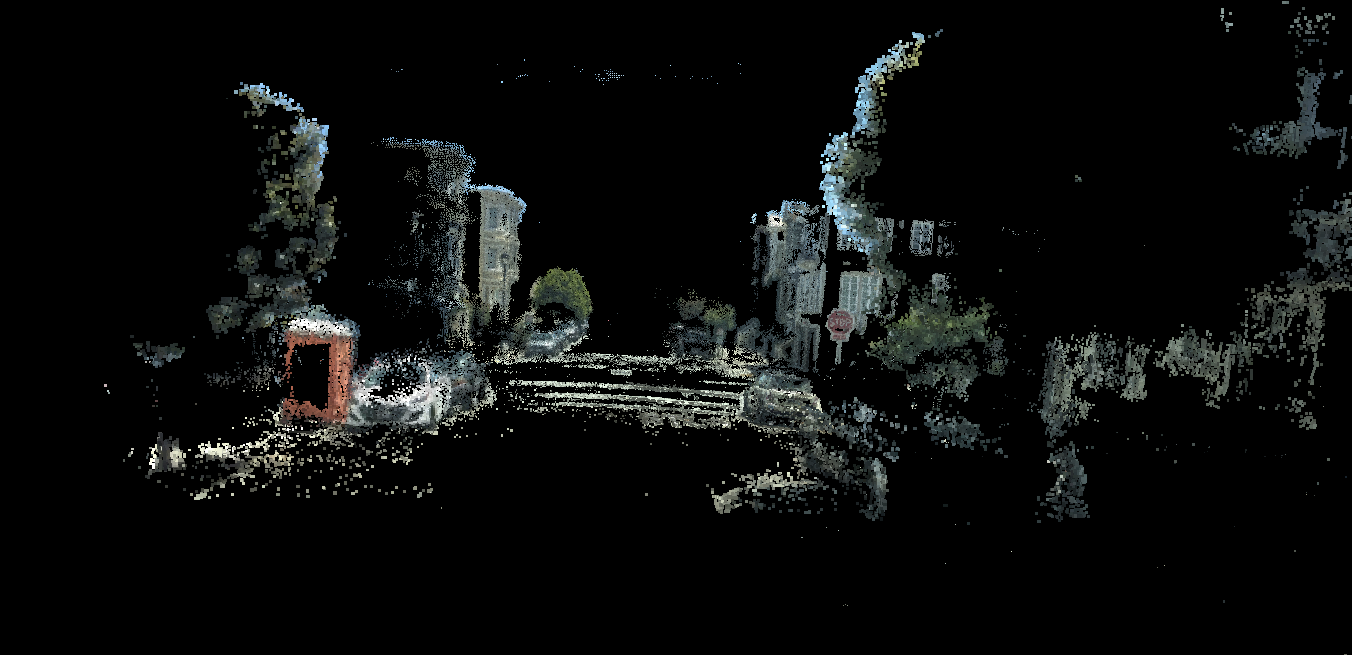
Lvl5 创立于 2016 年 12 月,它的三位创始人分别是前特斯拉 Autopilot 团队成员 Andrew Kouri 、Erik Reed 以及前 iRobot 计算机视觉工程师 George Tall。他们利用车上的摄像头拍摄大量的视频,然后将之转换为持续更新的高精度 3D 地图。这些地图能够反映实时的道路状况,并为自动驾驶汽车提供安全地探测和规划路线所需的信息。
「大家都容易忽视的一件事就是,只有有了每天更新的高精度地图,自动驾驶汽车才能正常行驶。」Kouri 在接受 The Verge 采访时这样说道。「还没有人来做这件事,而这正是我们要做的。」
Lvl5 今年三月刚从 Y Combinator 加速器毕业,他们认为,与科技公司和汽车制造商们现在正花大价钱投入的昂贵传感器相比,他们的解决方案更为经济实惠。而且,他们相信,与 Mobileye、TomTom 和 HERE 相比,他们的系统也更好。
Kouri 说,自动驾驶汽车不需要激光雷达(LiDAR)。这与很多科技公司和汽车制造商的想法大相径庭,但与特斯拉的理念却有相似之处。
「我们并不关心最后激光雷达和计算机视觉谁会赢,但就目前来说,计算机视觉比激光雷达更具可行性。」Kouri 说。
Lvl5 通过众包的方式把收集数据的任务交给 Uber 和 Lyft 的司机。首先,司机们需在手机上下载一款由 Lvl5 开发的软件 Payver,并将手机放在汽车的仪表盘上。这样,在汽车行驶过程中,Payver 就会自动收集视频、加速计、GPS 等数据。这些数据经过压缩处理后将被送往云端,然后再送往 Lvl5 中心。在那里,Lvl5 将用计算机视觉算法把所有视频转换成高精度 3D 地图。
到目前为止,已经有 2500 名司机下载使用 Payver,而 Lvl5 也已经绘制出了美国 50 万英里土地的地图,并且在持续更新中。
现在,Lvl5 正与一家汽车制造商合作测试其系统。他们的目标是以后进一步扩大合作范围,向每一个安装其系统的汽车制造商收取一笔安装费。另外,由于高精度地图会随时更新,所以每位用户需按月缴纳一笔订阅费。
去年,特斯拉曾因其 Autopilot 失误导致一名 Model S 车主发生车祸。Kouri 说,如果有地图,就不会发生误判了(Autopilot 将一辆卡车误判成了一座桥,认为 Model S 可以从桥下通过)。
「那时,我知道有公司正打算推出 2 级自动驾驶,但却没有可用的地图,这是很可怕的。」Kouri 在一封邮件中说道,「是我们该行动的时候了。」
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
同时欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)& 极市 (微信号:geeket)。
