
(注:禾多科技是一家国内的自动驾驶创业公司,创始人倪凯曾先后加入微软、百度、乐视,参与并主导包括多个无人车项目、微软三维地图和 HoloLens 增强现实眼镜的研发项目。禾多科技提供的是 L3.5 自动驾驶系统,即把一个准 L4 系统降为到 L3 来使用,有更高的安全标准,同时它又适合量产。)
在发布会当天,禾多科技包下了北京瑞得万赛车场的室外场地,而包下赛道的目的就是为了展示基于轩辕平台打造的自动驾驶汽车:一辆大众 B8 迈腾、一辆别克昂科威。

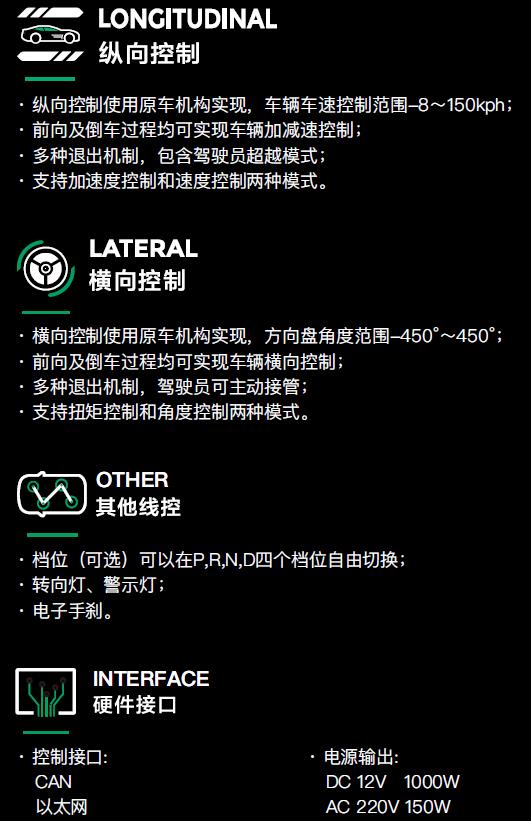
先说轩辕自动驾驶研发平台是什么,禾多方面给它的定义是:可以赋予传统量产车辆自动驾驶的基础能力,即稳定可靠地实现对车辆的行驶、制动、转向和换挡以及灯光控制。线控核心参数符合研发需求,适合集成更多传感器和设备,并支持完整的软硬件工程定制需求,配以灵活的本地技术支持,完美满足开发者对 L2 到 L5 级别的自动驾驶研发系统的要求。
轩辕平台到底都有哪些功能?支持哪些软件和硬件?请看下表:

当然,仅仅依靠禾多科技一家公司就打造出一个「平台」还是有点难,不过从倪凯请来的嘉宾中,你可以推断一下禾多科技的合作伙伴:博世、英伟达和 Velodyne。当然,还有禾多科技的战略合作伙伴、早期投资方四维图新。
看到自动驾驶平台二字,让我想起了百度阿波罗平台,所以难免会有人问:禾多科技的轩辕平台和百度的阿波罗平台,有什么区别?
倪凯打了个比方:「两个是不同层面的平台,阿波罗主要是大脑层面的能力,而轩辕则强调四肢和眼睛,比如线控、各类传感器、嵌入式和基础的能力。两者是共存的关系,不是重合的关系」。
至于为什么做出轩辕平台,倪凯说:「我们希望与同行共享一个亲测有效的解决方案,将大家用于填坑的宝贵时间和精力解放出来。」
打个比方,假如你是以「算法」切入自动驾驶的创业者,做的是偏「软」的东西,你就可以使用偏「硬」的轩辕平台。原因在于系统设计和硬件扩展能力是研发自动驾驶系统的基础,在打基础的过程中会涉及到电源供给、冷却设计、传感器写作、操控稳定性等问题,使用轩辕平台的好处就是它有快速响应的能力和实操经验。
轩辕平台的负责人表示,轩辕目前可以在一周内交付使用。
下面聊自动驾驶版迈腾和昂科威。


这两辆车均用于演示「循迹行驶」,昂科威用于演示绕八字,迈腾用于演示赛道上的行驶以及高速避障(时速约 60km/h)。至于其中的原理,简单来说就是把路线的 GPS 坐标输入到自动驾驶系统中,再由电脑根据当前位置去控制油门/刹车和转向。说起来简单,做起来很复杂…


在刚看到禾多科技深度改装的迈腾时,我的第一感觉就是:太工整了,很干净。在此之前,我也体验过不少自动驾驶汽车,而禾多科技改装得算比较「漂亮」的,各种传感器、数据线和电脑都被隐藏了起来,连车标、方向盘标都换了自己 Logo。外观内饰的整洁程度,和我之前试乘过的德尔福自动驾驶版 SQ5 处于同等水平。



关于试乘体验,这两辆车的横向、纵向控制都比较精准,转向时没有多余的抖动,而不成熟的改装车转向时会有「帕金森」症状。
前面提到,倪凯从创业到今天的自动驾驶演示,也不过三个月的时间。这样的速度并不令我惊讶,因为在倪凯还在乐视工作的时候,我就坐过他主导改装的自动驾驶版高尔夫旅行,那时还是 2016 年 10 月。

当时体验者可以在一个平板电脑上划任意路线,路线下发给车辆后,车辆就会在场地内循迹行驶,比今天演示的案例更为复杂。所以禾多科技的今天的成果,和团队成员丰富的从业经验分不开。
回到前面说的轩辕平台,既然是一个「平台」,我认为它最终能不能发挥最大的价值,还得看有多少自动驾驶团队使用了它,这也是轩辕平台的初衷。
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)& 极市 (微信号:geeket)。

