
做自动驾驶处理器不是一件容易事,它需要满足高算力、高稳定性、高安全性、低功耗等相互之间很难平衡的特性。在这个领域,目前业内知名的供应商就只有 Mobileye 和英伟达(NVIDIA)这两家。前者是绝对的老大,后者是后起之秀,意图弯道超车。
身为老大,Mobileye 的技术自然稳稳领先,这也决定了这家公司的技术体系相当封闭——厂商想合作,只能整套购买他们的解决方案,而就算买了,他们的数据和技术细节也不开放给你。
2017 年 8 月,英特尔通过用约 153 亿美元收购 Mobileye 的方式,直接打入自动驾驶领域。被收购后,Mobileye 就宣布了会在未来产品迭代过程中逐步开放其技术体系。去年底,他们开放了叫做 RSS 的模型,并且在全球范围卖力推广。两个月前,它到了中国。
「实际上 RSS 就是代码,它可以和所有不同的自动驾驶车基于 AI 的软件兼容,也就是被别人的产品来使用,并且有不同的实施方式,例如可以在 CPU 上,也可以在 FPGA 上。」英特尔无人驾驶解决方案资深首席工程师、首席系统架构师 Jack Weast 解释道。

英特尔无人驾驶解决方案资深首席工程师、首席系统架构师 Jack Weast
这么听起来,Mobileye 似乎确实决定走出「闭关锁国」的过去了,在他们终于想通要开放技术体系的背后,承受了哪些压力?另一个角度说,他们将 RSS 代码公布给业内,除了服务大众,目的是什么?
来自英伟达的压力
Mobileye 的战略转变部分出于来自竞争对手英伟达的压力。这要从两家企业的不同定位说起。
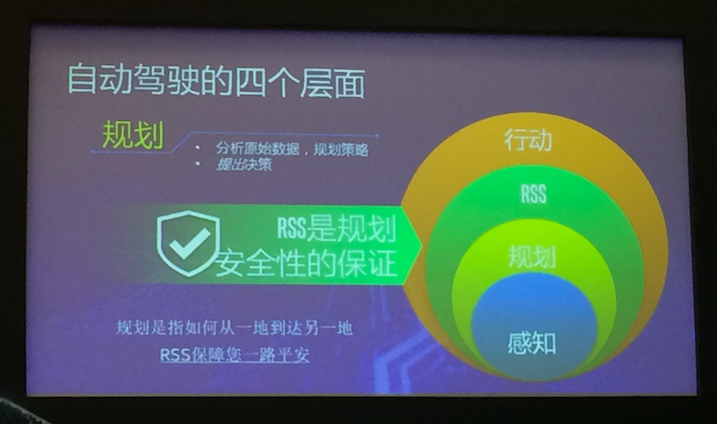
Mobileye 提供的是「全方位」的解决方案,主要做 L1 到 L3 级别的前装 ADAS。 他们的硬件产品是基于 ASIC 架构的 EyeQ 芯片(从 2004 年开始推出),并配合有自己定制化的视觉感知算法。他们自动驾驶车的「大脑」包括四个部分:EyeQ 芯片、自动驾驶策略、安全的防护层 RSS、地图技术 REM。
由于有长期的数据积累、功耗低、更符合车规级要求,目前为止,大部分前装领域的高级驾驶辅助系统中使用的都是 Mobileye 的方案。
EyeQ 系列芯片已经迭代到 EyeQ4,可以用 3-5W 的功耗实现 3.5 万亿次/秒的算力,在蔚来 ES8 上首次搭载,而 REM 也和上汽、四维图新达成了合作。
Mobileye 本身的定位就是用整套方案服务于量产车,以实际应用量、市场占有率为优势。7 月 1 日,Mobileye 中国区总监 Boaz Sacks(伯恩赐)也骄傲地给出了数据:现在全球搭载 Mobileye ADAS 安全方案的车辆超过 2700 万辆,使用 Mobileye 产品的 OEM 有 25 家,其中 13 家和 Mobileye 在自动驾驶上有合作。另外,现在 Mobileye 的市场份额超过 70%,几乎是「孤独求败」的状态。

Mobileye 中国区总监 Boaz Sacks(伯恩赐)
这样就导致一种现象:面对 Mobileye 的封闭体系和称霸前装的地位,车厂实际上没有什么选择余地和议价权。然而,现在车厂对技术层面的兴趣和野心都在逐步增加。「客户不仅要求产品好用,还想知道好用的原因,而且想自己改进和调整,这些 Mobileye 都无法满足,想改进只能买他们下一代整套产品。」
恰好英伟达能满足这种需求。2015 年,英伟达发布了应用于自动驾驶汽车环境信息识别处理的 DRIVE PX,比 Mobileye 晚了 11 年进入这个领域。目前,他们的硬件产品主要基于通用的 GPU 架构。
英伟达通用的计算芯片 GPU 并不是专门为自动驾驶设计,所以在应用时有高功耗、高成本的问题;而在量产车所追求的安全性、稳定性、制作效果上也难以和 Mobileye 的产品竞争。与之同时,英伟达的优势实际上在于开放的技术体系,例如他们卖的产品有芯片、驱动、软件开发包、应用工具等。
出于上面的原因,英伟达集中于前瞻领域,采取了弯道超车战略。他们和车企提前深度合作来研发较高级别的自动驾驶功能。 目前,英伟达的后装技术主要被放在车厂 L4、L5 级别的概念车、自动驾驶测试车里。
可以说,Mobileye 占领的是「现在」,而英伟达在「未来」更有潜力。业内认同的 L4 级以上自动驾驶技术的量产时间是 2021 年左右,Mobileye 能够眼睁睁看着英伟达布局未来市场无动于衷?为了赢得客户信任,实际上 Mobileye 正被迫走向开放。
开放 RSS 模型
RSS 模型是 Mobileye 技术系统开放的一环。
RSS 是什么?它的英文全名是 Responsibility Sensitive Safety,翻译成「责任敏感安全模型」,关于它的原理 GeekCar 有过介绍。简单地说,RSS 就是融合了数学公式和计算方法的代码,能兼容任何的自动驾驶车基于 AI 的软件/解决方案。它通过数学公式为人类界定安全驾驶的概念,让自动驾驶汽车能自我判断安全状态,避免发生可能的事故。
Mobileye 方面称,发布 RSS 模型是因为,行业在通过已有的技术来判断自动驾驶的安全性上存在相当大的困难。目前人类驾驶的事故概率是 10^-6 ,要想你的无人驾驶的安全性被外界广泛认可,至少要达到目前航空业的安全水平—— 10^-9 的事故率。目前业内验证的方法主要有两种:
第一、统计学方法。 这种方法意味着你的行驶里程越长越安全,如果要证明致死率够低,大概需要行驶 300 亿英里,这是没有经济性、不可能实现的。而且在验证中行驶的车辆所处环境单一,也让这种方法不实际。
第二、基于 AI 的规划算法。Mobileye 认为这种方法的缺点不安全、不透明。
1)它是对于自动驾驶汽车应当如何采取行动的最优推测,是概率性的;
2)它和你所培训的人工智能系统数据相关,而 AI 总会遇到没有接触过的场景,是无法被充分验证的;
3)它的效果取决于训练时所用数据的质量;
4)把安全嵌入 AI 算法会导致汽车行为过于保守,无法行驶;如果用上百个 TB 的海量驾驶数据打破这种保守,经济性又很低,所以 AI 算法仅限于统计学论据,无法得到正式的验证。
Jack Weast 告诉我们,在 RSS 的模拟测试中,自动驾驶的数学公式完全是根据人类驾驶的方式和习惯设定的,所以基于 RSS 的自动驾驶车的驾驶反应是拟人的,这也更有利于发生事故时的责任判定。目前,RSS 的自动驾驶车辆上有两套独立并行的感知系统,来降低感知的错误率。一套是地图、摄像头等自动驾驶感知系统;另一套是无线电雷达、激光雷达。
Mobileye 所希望的是,通过与当地政府合作,将 RSS 定义为一个「开放、透明、技术中立的行业规范」。他们也是这样介绍 RSS 的:RSS 可以提供一个保障无人车安全及认证责任的统一标准,并且只需要参与各方分享少许安全数据而不触及核心知识产权就可以实现。
尽管 RSS 解决了在验证安全性时对时间长度上的数据要求,但是并没有解决从空间宽度上的数据需求问题,它还是需要大量数据的。想把这个技术和数据体系做到一种规范级别的普及,也不可能只靠 Mobileye 他们一家公司,或几家合作伙伴。
走出数据瓶颈
Mobileye 现在需要的是什么数据?答案是当地的行驶情况数据。
Mobileye 在 RSS 中使用了深度学习、机器学习、增强学习等各种人工智能方法。在自动驾驶车的认知、计算机视觉方面主要用了深度学习;在驾驶策略方面采用的是增强学习,这其中有奖励机制,可以做到汽车自主驾驶的定制化。
RSS 代码的数学公式中,有一部分是常数,另一部分属于变量,这个变量更需要因地制宜。例如汽车变道距离是一个变量,在中国设置这个数字时需要把它留短点。另外,政府从道路监管方面可以接受的风险也要通过变量的设置来调整,例如在住宅小区里的限速低,而高速公路上限速会高很多。
「这也是为什么我们要和中国的高校、中国政府机构合作,我们希望能够有更多中国的交通数据。」Jack Weast 说。当然,设立的这个法规框架,Mobileye 也需要政府同意,才能把驾驶时的责任问题分清楚。「目前 RSS 已经在以色列耶路撒冷进行车辆路测,很快也会在美国进行相应路测,我们希望通过和中国各组织的合作,把 RSS 带到中国。」
上个月,英特尔 Mobileye 和清华大学、中国科学院自动化研究所合作,成立了英特尔智能网联汽车大学合作研究中心。根据合作协议,各方将围绕创新性的车联网应用以及平行驾驶等领域展开联合研究。
Mobileye 的 RSS 现在由于数据不足,缺乏试验,可以说只是一个雏形。 在耶路撒冷、中国这种复杂路况下路测,Mobileye 希望使 RSS 的安全场景更全面,得到进一步完善。
「目前主流厂商都称他们达到 L3 级以上自动驾驶的时间点是 2020 到 2021 年,所以 RSS 的第一次正式部署应该也在 2021 年左右,具体要看我们客户的时间点。从现在到 2021 年,RSS 确实还需要做大量路测。」
其实,RSS 这种模型不是新概念,在工业自动化系统、航空系统早就存在, 在汽车技术行业也已经有很多类似于 RSS 的模型存在。 所以,RSS 并不是 Mobileye 所独有的创意和技术,这种共享也不完全算他们放宽了对技术的保护,重点还是在于新数据的获取。
他们也承认这一点:「这也是为什么我们把 RSS 拿出来和业界共享的原因。我们觉得存在类似的模型是好事情,业内可以互通有无,最后共同建立一个大家都遵守、政府也支持的责任模型。」
另一方面,深度学习等 AI 方法被应用到汽车自动驾驶行业是从 2015、2016 年开始,这些技术颠覆了传统的对视觉图像进行人工手动标识的方法——此前 Mobileye 一直是这么做的,让机器收集数据、获取数据的能力迅速增强。
英伟达就是第一批这么做的公司,它的快速追赶让 Mobileye 多年积累的数据优势越来越不明显。无论是 REM 还是 RSS,都能帮 Mobileye 跳出数据瓶颈,而为了未来考虑他们也会越来越开放。
殊途同归
随着全行业 L4、L5 级别自动驾驶汽车的上路,Mobileye 自我技术体系将逐渐开放,并且专注于更高级别自动驾驶技术的研发、应用;英伟达也将实现量产。两家巨头在行业内的定位和作用开始趋同。
可能了解 Mobileye 的人会说,他们只做纯视觉方案,而英伟达激光雷达、毫米波雷达、视觉什么都做,所以还是有差异的。不过最近 Boaz Sacks 已经明确表示,未来他们会告别纯视觉。
Mobileye 采用纯视觉方案的原因主要有下面两点:
1)成本问题。 这一点和他们服务量产车的定位相关,激光雷达的高成本并不适合量产——这也是特斯拉拒绝激光雷达的主要原因。
2)技术问题。 实际上,目前激光雷达的技术在实现车规级量产时遇到了壁垒。目前为止,法雷奥是全球唯一一家实现车规级激光雷达量产的企业,他们的车规级激光雷达 Scala 在去年搭载于新奥迪 A8 上,首次落地。
现在,Mobileye 在无人车的正面采用长焦、中焦、广角镜头的三目方案,来确保大部分探测区域都有多颗摄像头来负责感知,形成传感器冗余。Boaz Sacks 最近明确表示:「机器视觉技术已经高度成熟且便宜,因此在技术路线上,我们会优先发展物美价廉的纯视觉感知方案。 日后,若激光雷达等传感器的成本明显下降,Mobileye 也会采用其作为安全冗余。」
另外,从战略层面来看,英特尔收购 Mobileye 就是想让它在自动驾驶领域来跟英伟达竞争的,他们下赌注在这家创业公司身上,就算 Mobileye 未来出于喜好还执着于纯视觉,英特尔应该也不会允许了。
未来两巨头必定殊途同归。一种第三方的观点是,当 L4、L5 的量产落地,英伟达强大的算力和开放的技术体系,将让他形成巨大优势,做到弯道超车。不过至少还有三年,英特尔已经想明白了,应该也会抓紧转型的。
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车(微信号:GeekCar)& 极市(微信号:geeket)。
