
和 Autopilot 1.0 相比,Autopilot 2.0 可以说是「大换血」,无论是硬件还是软件都有了很大进步。
这里有一个官方视频,演示了特斯拉所理解的「完全自动驾驶」:
全自动驾驶,有多厉害?
特斯拉所谓的「全自动驾驶」是什么样的?特斯拉为我们列举了几个具体的使用场景。
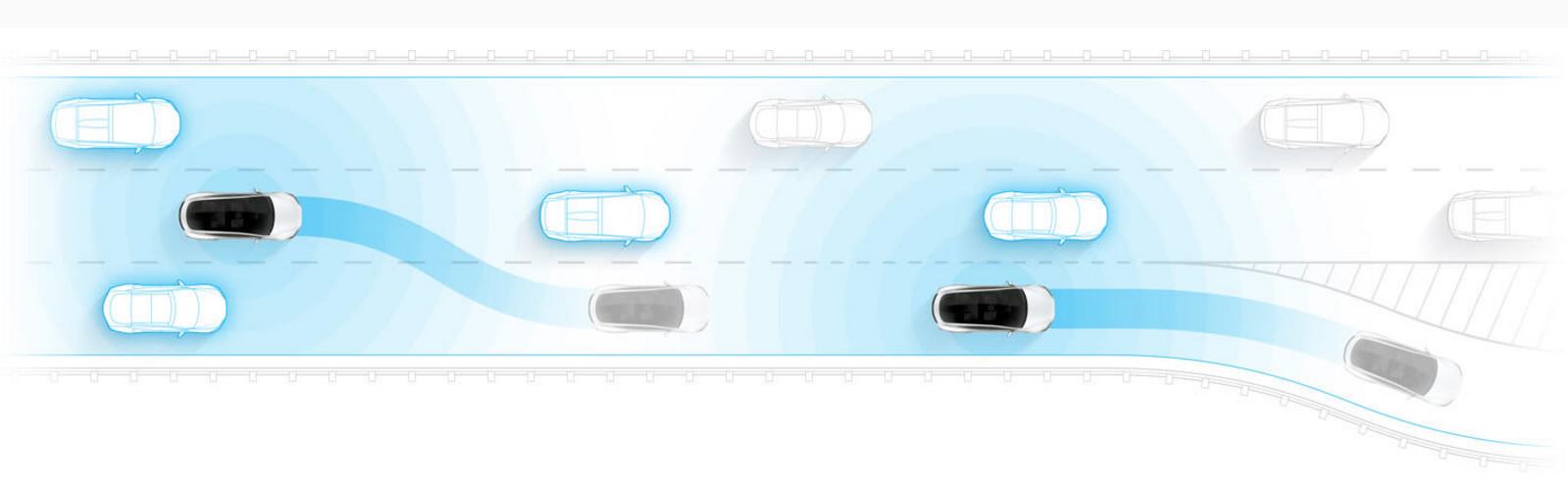
在高速上,特斯拉会自动根据车流速度调节车速,保持在车道内。当有变道超车的机会时,不需要用户进行任何操作,它就能自动变道。
当需要驶向下一条高速时,也不需要人类介入。为了保证顺利进入高速出口的匝道,当本车道车流变慢时,特斯拉会主动变道保证顺利下高速。当用户接近目的地时,它也会自动下高速。
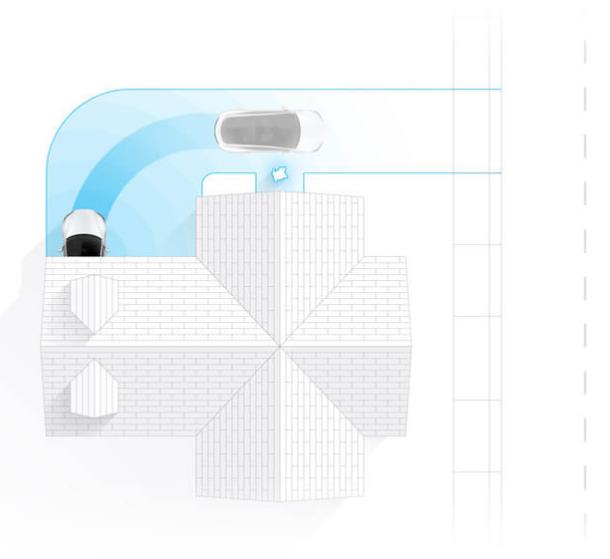
原有的自动泊车、召唤(Smart Summon)功均有所升级,可以应对更复杂的场景。比如, 到达目的地后,用户只需下车就行。特斯拉会自动进入「找车位」模式,找到车位后会自动驶入,用户需要用车时,只需点下手机车就会来接你。
总之,特斯拉官方表示,这套系统的设计就是为了让用户无需操作,就能完成短程和长途行驶。用户需要做的,只是告诉车辆目的地,如果什么也不说,车辆就会根据日程表里的行程把你拉到目的地。
对了,如果你要用全自动驾驶功能做共享用车,偶尔拉个朋友或家人是没问题的。如果是为了赚钱,比如拉 Uber、滴滴,那就得通过 Tesla Network 才行,具体细节会在明年公布。
传感器更多,处理器更强悍
它怎么实现的?和 Autopilot 的上一次更新不同,这次特斯拉是彻底进行了硬件升级。
Autopilot 2.0 的硬件配置如下:
8 个摄像头,可以时刻监控 250 米范围内的道路状况。
车辆前向摄像头为 3 个,一个视野角度是 50 度,负责一般性的道路状况监测;一个视野角度是 25 度,用于探测前方的车道线、红绿灯;还有一个视野角度是 120 度的鱼眼镜头,用来探测并行车道的状况、行人和骑自行车的人。
12 个升级过后的超声波传感器作为「补充」,侦测范围是摄像头系统的两倍。车头的一个前向雷达提供额外的数据,可以「看穿一切」,包括大雨、雾、灰尘甚至是前面的车辆。关于 这些传感器的具体职责和性能,请看下图:
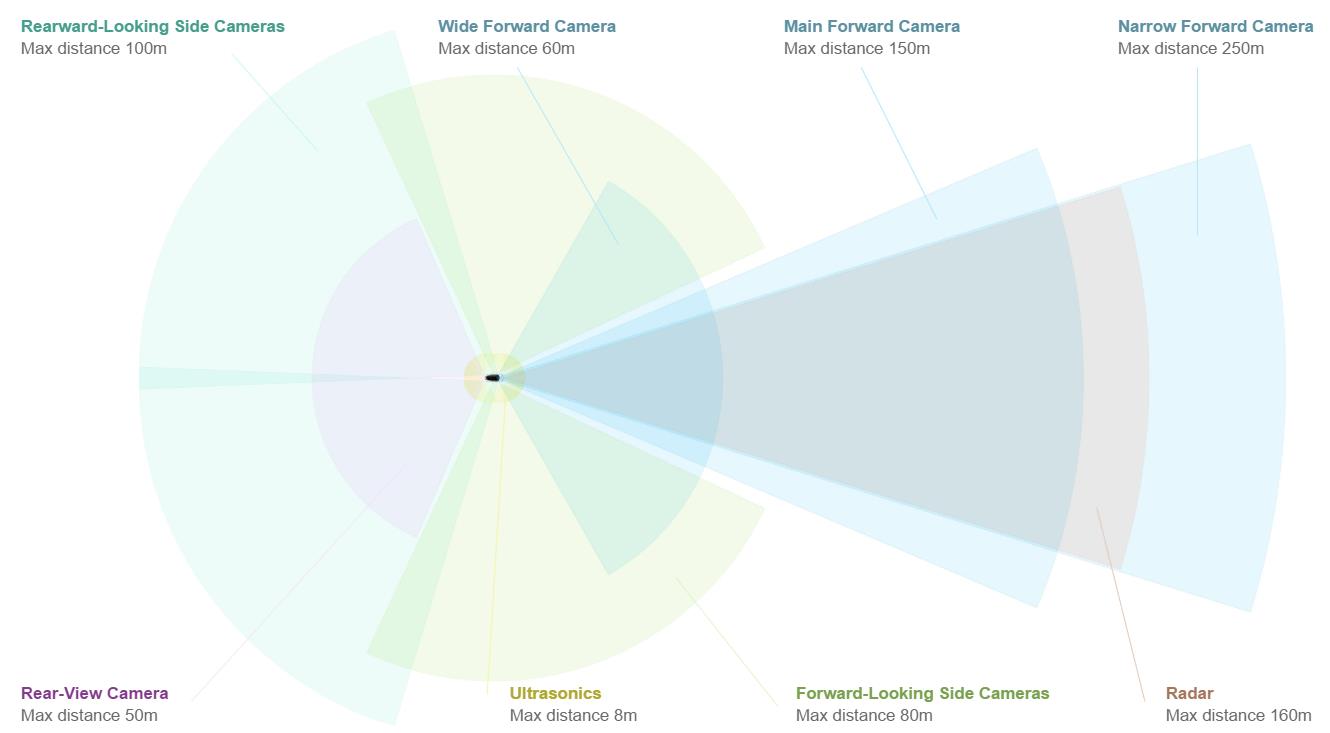
这些传感器可以做到 360 度无死角侦测,这一点比人类强不少。特斯拉非常自信的表示,他们所提供的全自动驾驶功能,安全程度远超人类驾驶员。不过,算法打磨得如何,很大程度上决定了车辆的表现。
特斯拉这次用的是 Nvidia Titan GPU,它每秒能进行 12 万亿次计算,处理性能是上一代的 40 倍。另外,他们还使用了神经网络,新的声呐和雷达信号处理软件。
之所以特斯拉能用这个方案,和芯片技术的发展有很大关系。在此之前,Elon Musk 公开承认过,他们其实已经「榨干」了特斯拉车内硬件的潜能(包括芯片)。这次要不是因为新的 GPU,8 个摄像头的方案应该是没有硬件支撑的。通俗的说就是,Autopilot 2.0 的这个 8 摄像头方案,「挺费显卡的」。
说实话,升级版的 Autopilot,在技术路线的选择上挺出人意料的,不讨论结果如何,用另辟蹊径的办法解决问题,确实是特斯拉的强项,这次,他们的脑洞又赢了。
横向对比来看,特斯拉这次实现「全自动驾驶」,靠的依然是雷达+摄像头的组合,并未使用激光雷达。
一方面,是因为激光雷达现在成本降不下来。Elon Musk 想让全自动驾驶尽快上车,激光雷达是不太现实的选择;另一方面,特斯拉的技术或许已经足够成熟,依靠雷达+摄像头+高精地图就能解决这件事。 随着技术的发展,这两条技术路线应该会长期并存,形成互补。

这功能得花多少钱?
根据特斯拉官方的说法,目前生产的车型已经具备了全自动驾驶所需的硬件,现在订车的用户,收到的车辆硬件肯定是齐全的。
「加强版 Autopilot」选装包的定价为 45800 元,新车交付后启用需要 55000 元。「全自动驾驶功能」选装包的定价为 27500 元,新车交付后启用需要 36700 元。
说简单点儿,要想体验到全自动驾驶,订车时你就得多花 45800+27500=73300 元。
注意,加强版 Autopilot 仅激活了 4 个摄像头,全自动驾驶功能才使用了 8 个摄像头,但两者都会使用所有雷达。
有意思的是,在官网介绍中加强版 Autopilot 选装包被定义为辅助功能(Assistance feature),并强调用户依然需要时刻掌管车辆,并为此负责。
当理想主义遇到现实
我们不过多评价升级版 Autopilot 到底靠不靠谱,毕竟这有待于将来用户在长期使用过程中的检验。我们想说的是,就算特斯拉在「单一个体」上具备了完全自动驾驶的能力,它面临的难题,其实还是很多。
比如,我就不太相信特斯拉所谓的「找车位」能在所有地区实现。比如在北上广,人都不一定能找着车位。在拥挤的一线城市,让车自己去找车位,可能的后果就是人下车了,车自己去找车位了,一直转悠到没电……
即使是在国外,这种高度自动化的功能也面临很大考验。在繁华市区,如果没有 V2I 技术的帮助,车位如何寻找是一大问题,比如停地下车库的话,进去了有车位吗?在特斯拉的演示视频里,停车的场景看起来是在郊区的停车场,并且停车位非常规整。
(写到这里,我已经想象到网上马上会出现一辆没有人的特斯拉在路上跑的视频了,坐等。)

顺便提一句,它还新增了「自动充电」的功能……Elon Musk 在推特上转发了自动充电功能的原型机视频。从外观上来看,是在车原有的充电口上加了个转接头,由一个机械臂把充电线慢慢插入转接头,之后就能开始充电了。
这一切是不是听起来有点夸张?不过事实确实如此…
写完上面的文字后,我有点儿猝不及防,真正的全自动驾驶就这么搞定了,连充电都不用动手了?要知道,上个月我们还在讨论特斯拉车祸呢。
首先要说明的是,特斯拉的全自动驾驶还面临着法律法规的问题。官方也表示,上面所提到的所有功能,可能会根据当地法规有所调整。真正落地的功能到底包括哪些,目前还不能确定。
其次,要实现安全的全自动驾驶,还需要高精度地图和 V2X 技术。
全自动驾驶很大程度上依赖于高精度地图,地图质量也决定了是否能顺利到达目的地。在这里,必须得关爱一下中国用户,因为中国的路况可能是世界上第二复杂的(第一是印度),况且很多地方还在不断修路。特斯拉的本土化工作做得如何,高精地图是怎么解决的,目前我们并不清楚。而这些,又决定了所谓的「全自动驾驶」功能在中国的可用程度。
由于目前基建设施和其他车辆都还未「联网」,所以特斯拉也无法使用 V2X 技术(车和车、车和基础设施等进行通讯)。这样一来,当路上只有一辆特斯拉处于全自动驾驶模式时,不确定因素会有很多。

所以,作为长期关注特斯拉的一名记者,我们也奉劝未来的特斯拉用户,在中国这样复杂的路况下,使用全自动驾驶依然是有风险的,不要过分依赖机器。而且,我们更愿意把特斯拉所说的「全自动驾驶」加上一个引号。
希望大家随手转发,拯救身边的自动驾驶脑残粉……
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)&极市 (微信号:geeket)。


3 responses to “特斯拉的脑洞依旧很大,但是中国的路况依旧很差”